问:SU04超声波避障模块是否支持aruduino的系统?
答:不支持,aruduino和pixhawk软件不一样。
问:开源pixhawk飞控安装的乐迪SU04超声波模块,定高模式超声波定高功能正常,留待模式下摇杆往前推,飞机会往左飞,是什么原因?
答:pixhawk飞控固件问题,刷3.6或以上版本的固件可以解决。
问:SU04通过pixhawk飞控连接至地面站后SU04不工作是什么问题?
答:连接SU04超声波模块时,飞控连接地面站不能通过USB供电,需要通过电池供电,SU04才能正常工作。
问:SU04超声波怎么打开或关闭避障功能?
答:超声波避障功能的打开/关闭通过改变 AVOID_ENABLE 值来设置。
在地面站里面选择“配置/调试”—“全部参数表”—“AVOIDENABLE:避障功能的打开和关闭”,数字选择2为 打开避障功能,数字选择0为关闭避障功能。
问: 怎样设置SU04超声波模块的避障距离?
答:模块的避障距离可通过改变 AVOID_DIST_MAX、AVOID_MARGIN 这两个值来设置。在地面站中设置如下:
配置/调试--全部参数表--AVOID_DIST_MAX:定高模式下的最大避障距离,单位 m
配置/调试--全部参数表--AVOID_MARGIN:留待模式下的最大避障距离,单位 m
问:pixhawk飞控地面站没有避障距离界面显示怎么解决?
答:pixhawk官方的最新版地面站显示数据不正常,需要通过我们 mini pix 专用的地面站来查看数据,下载链接如下:
http://www.radiolink.com.cn/firmware/MissionPlanner/MissionPlanner-1.3.49.6.exe
下载完乐迪专用地面站之后,断开 Pixhawk 重新启动,就可以查看模块的数据。
在 Mission Planner 地面站连接时会自动启动一个新的界面,该界面可以查看模块的数据状态(如果不出现该界面,需要点击桌面任务栏下该界面的图标)。
问: SU04超声波避障功能需要单独设置通道来控制吗?
答:① 飞控设置, CH7_OPT 参数。
进入-配置/调试界面,点击左侧的全部参数表,在右下角的输入框中输入 CH7_OPT并且按 Enter 键,即可搜索到该参数,将该参数的值左键双击,设置为 40(物体避障功能),再点击右侧的-写入参数即可。
② 遥控器设置。
选择一个二挡开关作为控制 7 通道的开关,在地面站的初始设置界面下的必要硬件的下拉列表中,左击故障保护,打开即可显示 7 通道的 PWM 值的界面,当拨动该开关时,7 通道的 PWM 值大于 1800,代表开关拨动到该位置时,避障功能打开,拨动到另一个方向时,7 通道的 PWM 值小于 1200,避障功能关闭。
问:SU04超声波避障模块最多可以装几个?
答:同时最多可以装3个,模块可以同时实现向前/向后/向左/向右/向上任意2个方向的避障和向下的定高。避障方向需要通过模块的按键来改变。模块默认的方向是向前,每按一次SU04的按键,模块的方向就会顺时针改变一次,并且模块的灯会闪烁相应的次数,提示当前模块的方向,并且永远保存该方向作为模块的方向,用户还可以通过地面站的数据查看当前模块是哪个方向。
问:可以用SU04超声波模块实现向下定高吗,怎么连接?
答:可以,pixhawk飞控用 4pin 的线一端连接 pixhawk 的 I2C 口,另一端连接模块。MINI PIX用一头 4pin另一头6pin的线连接,4pin 端连接模块,6pin 端连接飞控。然后在地面站进入-初始设置---可选硬件---声呐--选框中点击下拉,选中“MaxbotixI2C”或者“LightWareI2C”,不需要保存,重启飞控后,再回到这个界面,会出现模块的距离时,代表设置成功。
RNGFND_MAX_CM 设置为 450,RNGFND_MIN_CM 设置为 43(单位:cm)。
RNGFND_MAX_CM 是飞控在定高模式下能识别模块的最大距离。
RNGFND_MIN_CM 是飞控在定高模式下能识别模块的最小距离。
当模块发送的距离超过 43~450cm 时,飞控不识别模块的距离,默认通过气压计的高度来进行定高。
说明当前模块为向上防撞。上图是只接向上的模块显示,但同时再接向前避障模块时还是会有距离实时跳动。由于数据查看窗口只能查看水平方向的距离,因此查看向上模块的数据时,需要通过日志才能查看向上模块的数据。
问:SU04超声波模块避障是否有方向之分?
答:当方向为向前时,按一次按键,模块的灯快闪几次,并且通过地面查看的数据如下图: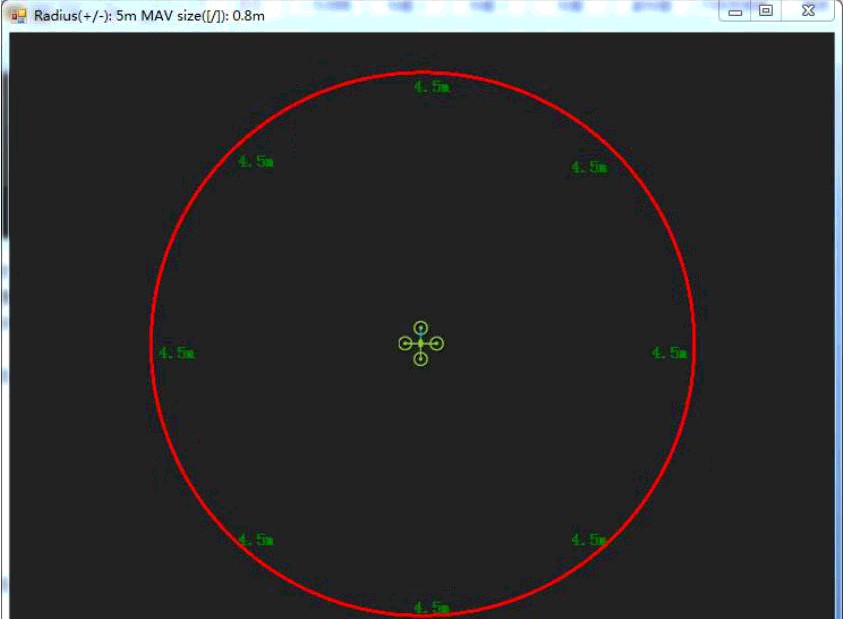


 Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程
Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程