


































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
SU04 FAQ
Q: Why my SU04 doesn’t function after connecting to RadioLink Mission Planner via RadioLink PIX?
Q: Why my SU04 doesn’t function after connecting to RadioLink Mission Planner via RadioLink PIX?
A: When connecting to SU04, the flight controller should be powered by a battery instead of by USB to connect with RadioLink Mission Planner.
Q: Is SU04 compatible with ARUDUINO?
Q: Is SU04 compatible with ARUDUINO?
A: No. ARUDUINO is different from PIXHAWK, which is the FC that SU04 works with.
Q: How to turn on/off the obstacle avoidance function?
Q: How to turn on/off the obstacle avoidance function?
A: This function can be turned on/off by setting the value of AVOID_ENABLE in RadioLink Mission Planner.
CONFIG/TUNING- Full Parameter List- AVOID_ENABLE, the value 2 is to turn on while 0 is to turn off.
Q: How to set the avoidance distance of SU04?
Q: How to set the avoidance distance of SU04?
A: The distance can be set by modifying the values of AVOID_DIST_MAX and AVOID_MARGIN.
CONFIG/TUNING sheet- ALL PARAMETERS- AVOID_DIST_MAX: The maximum distance(meter) with Alt-Hold Mode
CONFIG/TUNING sheet- ALL PARAMETERS- AVOID_MARGIN: The maximum distance(meter) with Loiter Mode
Q: Why there are no obstacle avoidance displays in the PIXHAWK Mission Planner?
Q: Why there are no obstacle avoidance displays in the PIXHAWK Mission Planner?
A: Data displays in the latest PIXHAWK official Mission Planner may be unusual. Please click the below link to download the RadioLink Mission Planner, especially for RadioLink Pix.
http://www.radiolink.com.cn/firmware/MissionPlanner/MissionPlanner-1.3.49.6.exe
When finish downloading, disconnect PIXHAWK and restart then all module data is available.
Note When connecting the RadioLink Mission Planner, there's a new interface automatically popping out where module data is displayed. If it doesn't show, please click the icon in the taskbar to activate it.
Q: Do I need to set an individual channel to control the obstacle avoidance function of SU04?
Q: Do I need to set an individual channel to control the obstacle avoidance function of SU04?
A:
YES. Setting steps as below
1 )Flight Controller (CH7_OPT Parameters)
CONFIG/TUNNING - Full Parameter List- Input CH7_OPT in the search column at the lower right corner and press Enter. As the searched CH7_OPT shown in RadioLink Mission Planner, change the value to 40(Object Avoidance) then click Write Params on the right to save.

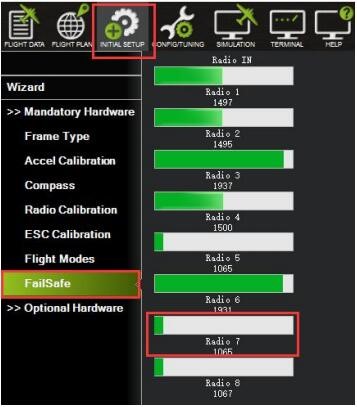
2) Transmitter setting steps
Choose a 2-way switch to control CH7 and click INITIAL SETUP- FailSafe, then the PWM value of CH7 is shown. When toggling the switch, if the PWM value of CH7 is more than 1800, it means the avoidance function is enabled. If the PWM value of CH7 is less than 1200, it means the avoidance function is disabled.
Q: Why did the aircraft fly to the left when toggling the joystick forward at Loiter Mode?
Q: Why did the aircraft fly to the left when toggling the joystick forward at Loiter Mode?
A: This is the firmware problem and it can be solved by flashing firmware of V3.6 or above.
Q: How many SU04 at most can be installed?
Q: How many SU04 at most can be installed?
A: There are a maximum of 3 to install at the same time. Two arbitrary directions (forward/backward/left/right/upward/alt-hold downward) of obstacle avoidance can be realized simultaneously. With every press of the button, the avoidance direction changes once clockwise, and the flashing frequency of the led indicator changes accordingly, showing the current direction and can be saved as preferred. The default direction is forward. It can be also checked in RadioLink Mission Planner.
Q: How to connect SU04 to realize altitude holding downward?
Q: How to connect SU04 to realize altitude holding downward?
A: With PIXHAWK- A 4-pin wire is needed with one end to connect the I2C port of PIXHAWK and the other to the SU04 module
With MINIPIX- A 4-pin to 6-pin wire is needed with the 4-pin end to the SU04 and the 6-pin end to the GPS port of Mini Pix
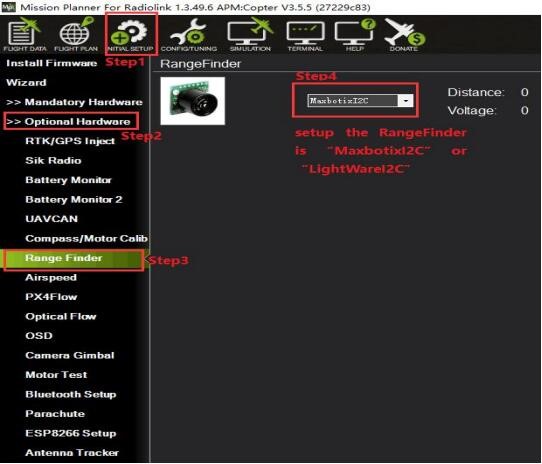
Mission Planner setup: INITIAL SETUP - Optional Hardware- Range Finder- Click the pull-down menu and choose MAXBOTIX12C or LIGHTWAREI2C
No need to save. When you repower on the flight controller and revisit this interface, if there is displayed module distance, it means the setting is done with success.
RNGFND_MAX_CM and RNGFND_MIN_CM represent the detectable maximum and minimum distance(cm) of the flight controller at Alt-Hold Mode.
Set RNGFND_MAX_CM as 450 and RNGFND_MIN_CM as 43, meaning the flight controller cannot identify the distance when the detective distance of the SU04 module is less than 43cm or more than 450cm. And the altitude held by the height of the barometer will be activated by default.
Q: Is there a directional difference in the obstacle function?
Q: Is there a directional difference in the obstacle function?
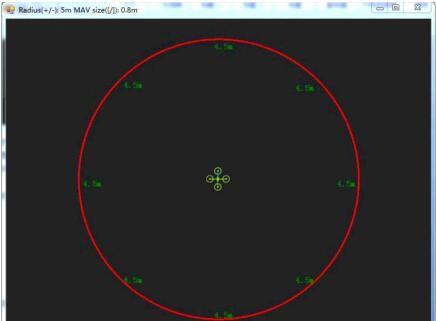
A: Yes. When the direction is forward, press the button once and the SU04 module will flash with data that can be checked in RadioLink Mission Planner as below, meaning the current avoidance direction is upward.
Q: After successfully configuring the SUI04 and SU04 ultrasonic obstacle avoidance modules, why does the device continue to move forward—and fail to stop—even when an object is detected at a distance shorter than the set obstacle avoidance threshold?
Q: After successfully configuring the SUI04 and SU04 ultrasonic obstacle avoidance modules, why does the device continue to move forward—and fail to stop—even when an object is detected at a distance shorter than the set obstacle avoidance threshold?
A: Please verify whether the current mode is Manual Mode. Obstacle avoidance functionality is not supported in Manual Mode; in other modes, the stop function should trigger normally.





 简体中文
简体中文- English