Introduction
High-precision navigation: Many drone applications require higher accuracy than traditional GNSS, such as drone mapping, drone measurement, and high-precision takeoff and landing.
RTK F9P is a four-star Real Time GNSS system from RadioLink, using two RTK F9P modules, one for the aircraft and the other for the base station.
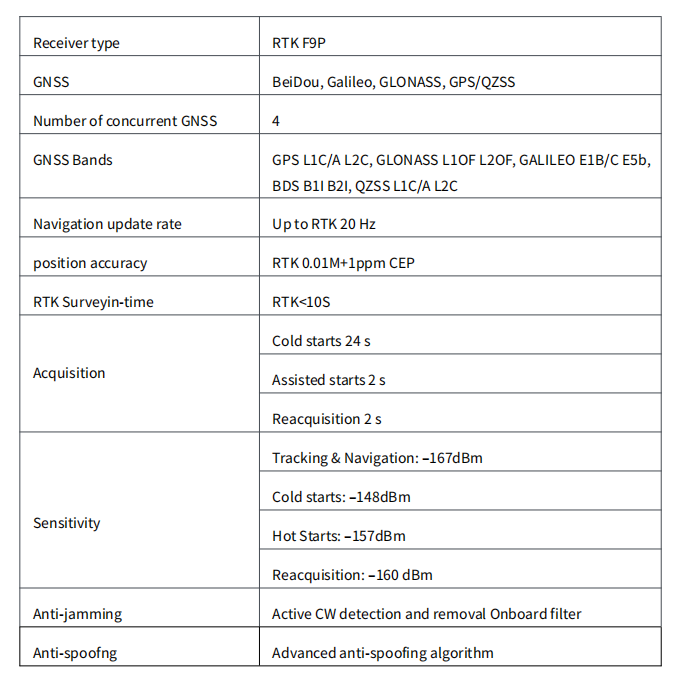
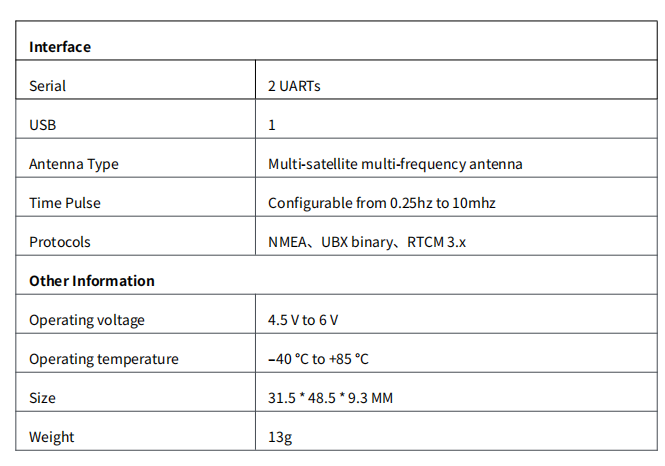
Technical Parameters
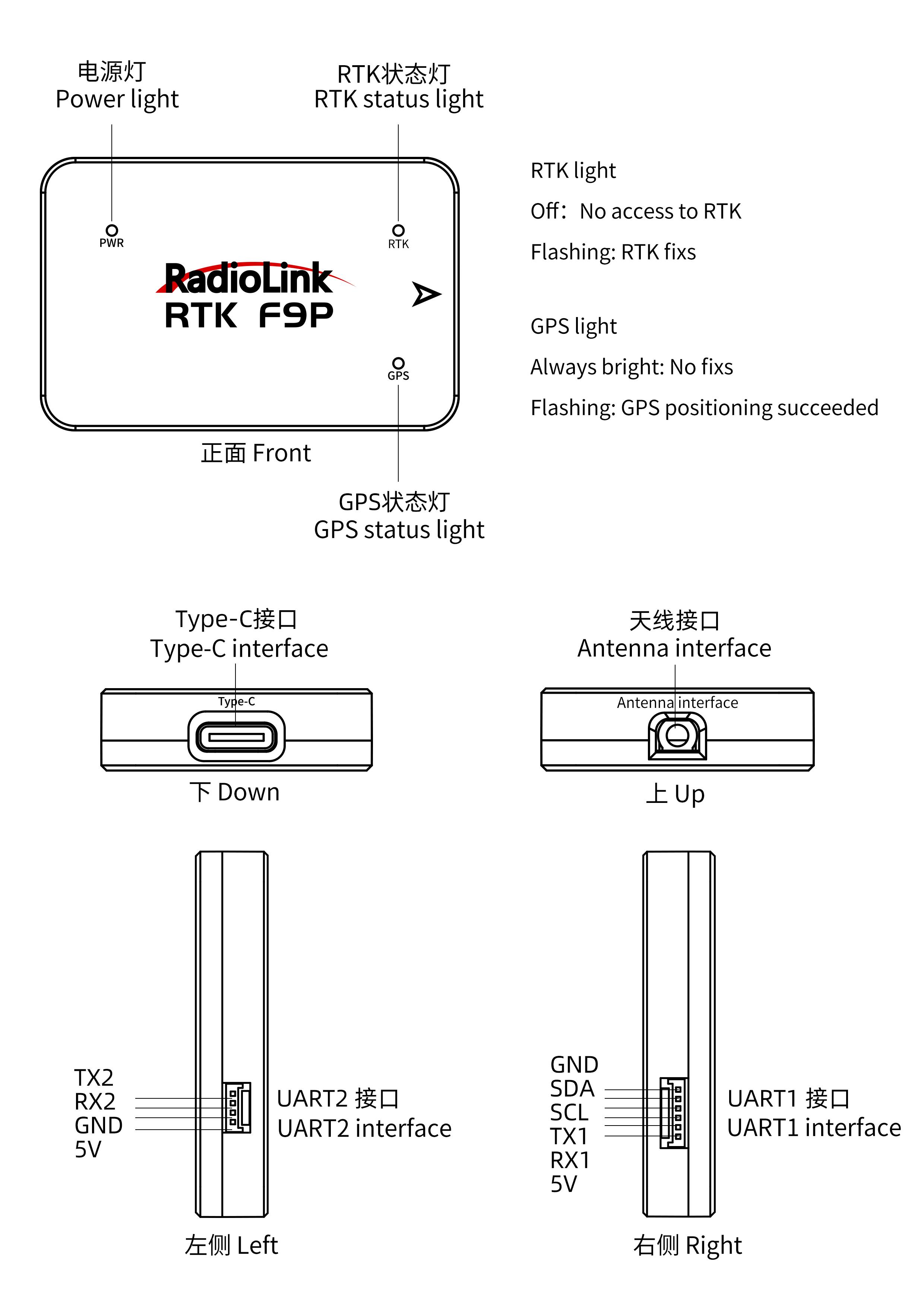
LED & Interfaces
Hardware Connection
RTK base hardware connection
The base station module is connected to the computer via a type-C cable; the ground end of the data transmission module is connected to another USB port on the computer.As shown below:

Note: Please place the base station module outdoors in an environment with sufficient sky coverageto obtain agood satellite search signal. Place the base station on a stable andelevated platform, such as a tripod.
You need to setRTK base in MissionPlanner. Formoredetails, please refer to 5. Set RTK base in Mission Planner
Rover hardware connection
Connect to PIX6:
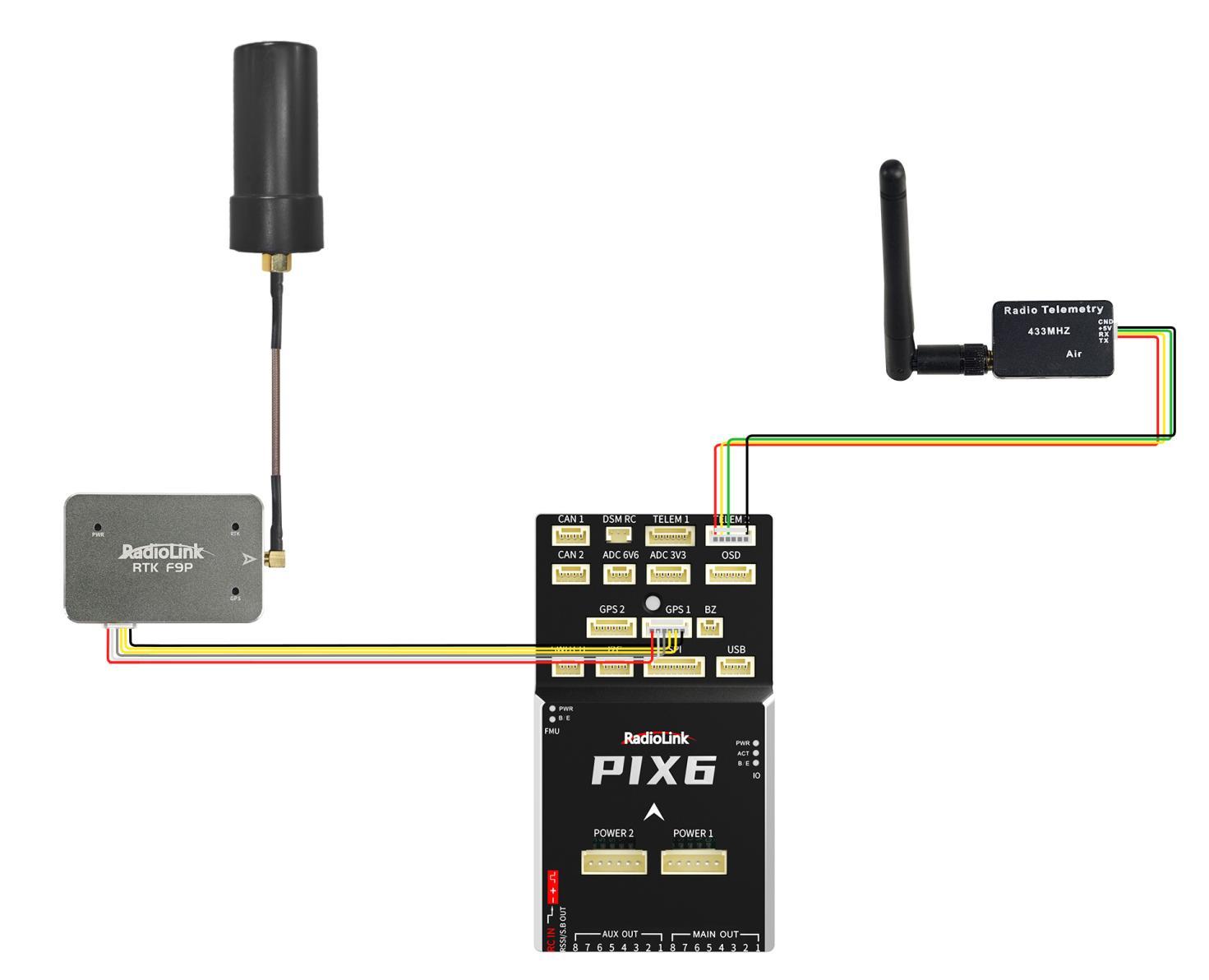
Pinouts
Pinout | UART1 |
1 | 5V |
2 | GPS_RX(UART1_RX) |
3 | GPS_TX(UART1_TX) |
4 | SCL |
5 | SDA |
6 | GND |
Set RTK Base in Mission Planner
Build an RTK base station
If you use Ardupilot firmware to build an RTK differentialsystem,you need to configure the base station positioning and forward datain Mission Planner. During thepositioning configuration of the base station, there is no need to start the mobile station and drone.
Open Mission Planner
Enter the initial setup
Click on OptionalHardware
Click on RTK/GPS Inject,youwillsee the following page:
(Note: If RTK/GPS Inject is not available in your Mission Planner, please update Mission Planner to the latest version.)
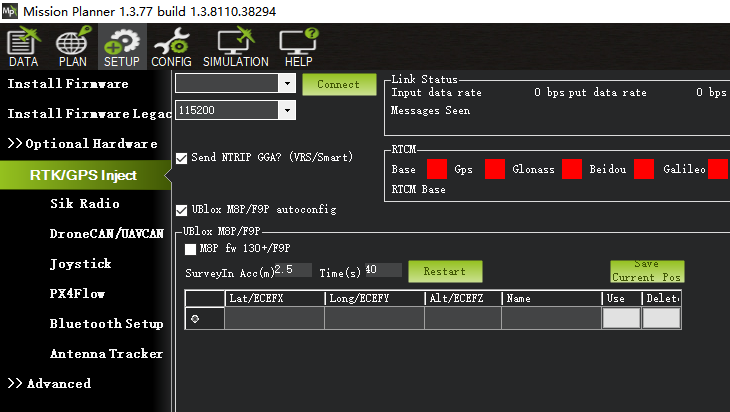
Set the base station port in the upper left corner
Click connect
Check "M8P/F9P autoconfig"
Click Restart (Mission Planner will transfer the data you input to the RTK base station, and the base station will start a new round of satellite search and positioning)
You will see the following page:
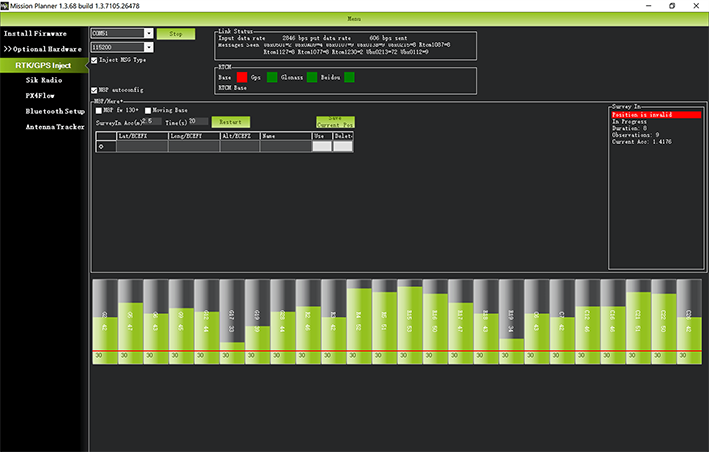
Position is invalid: The base station has not yet reached a valid location;
In Progress: Search satellite is still in progress;
Duration: The number of seconds the current searchstar has been executed;
Observation: the number of observations obtained;
Current Acc: The absolute geographic accuracy that the current base station can achieve. The green vertical bar below Mission Planner shows the satellite and satellite signal strengths currently searched by the base station. The base station requires a certain amount ofconvergence time to meet your desired accuracy requirements. If you need higher absolute accuracy, it may take longer.
Tip: In general, you can set Surveyin=2.5~3.0. The smaller the value, the longer the waiting time. Even if the base station accuracy is 2.5 meters, centimeter-level positioning accuracy can still be obtained after the mobile station solves. After the RTK base station is successfully configured, Mission Planner will display the following page:

The indicator light showing the status of the base station is green, and the status of GPS, Glonass, Beidou, and Galileo satellite systems are also green. The box on the right shows the status “Position is valid”and displaysthe current longitude and latitude.
RTK positioning status
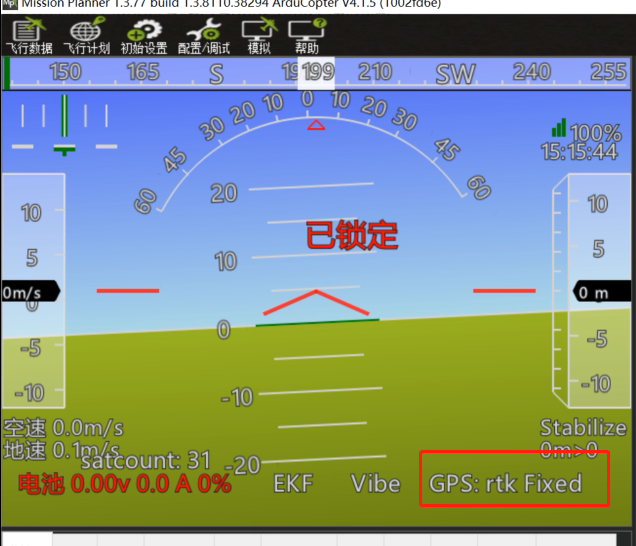
Using the paired digital transmission module to connect to the same Mission Planner, the data of the base station will be transmitted to the RTK mobile station on the drone through the data transmission module. In Mission Planner, you can see that the current GPS status of the drone is displayed as RTK Float/RTK Fixed/3D RTK, indicating that the positioning of the drone has entered the RTK state.
RTK Float is a floating point solution.
RTK Fixed is a fixed solution.
RTK Fixed has higher accuracy and is extremely environmentally demanding. Positioning can only enter the RTK Fixed state when the signal is good enough. 3D RTK is the unified display method for RTK Float/RTK Fixed in the Chinese version of Mission Planner.