本文简单介绍如何用Mission Planner地面站设置飞行计划,写入飞控让飞行器自主完成飞行任务。
一、 起使点定位
1. 打开地图
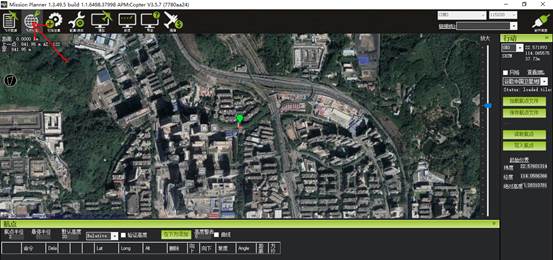
打开Mission Planner地面站,在顶层工具栏中单击“飞行计划”图标,切换到飞行计划界面。
初次使用请确保计算机处于联网状态,否则地图无法显示。
2. 找到自己位置
如何找到你的位置?
先在右侧栏,将地图类型切换到谷歌中国地图。

按住鼠标左键不松拖动地图,将你感兴趣的地方拖动到地图中心。然后可以通过鼠标滑轮进行缩放,也可以改变右侧栏的刻度进行缩放。
3. 设置起始点(HOME)位置

找到目标地后,将鼠标移动到你的兴趣点,点击右键。
弹出选项后选择最下面的Set Home Here
地图标记就会设定在对应的位置。以便后面切换地图类型。
H标记点完成。

此时即可将地图类型切换为谷歌中国卫星地图。

至此,我们找到并标记了我们的飞行场地。
H坐标点也可以单击鼠标左键拖动到你想要的位置,例如一片空地。

二、任务规划
下面以A-B-C三点航线为例,介绍操作步骤。

在地图上点击第一个点,就会出现一个标记点,同时下方会显示出1号标记点的属性,例如执行的动作、GPS坐标等。
下面继续标记航点。

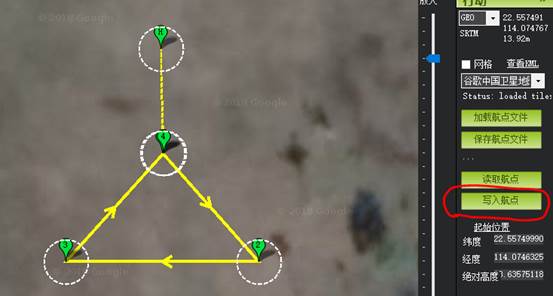
可以看到,我们一共设定了4个航点,其中1-4重合,形成一个3点闭合航线。
GPS坐标点确定,还需要设置飞行高度。

在此建议将高度设置为Relative(相对高度),即相对起飞点的高度,鼠标左键双击航点对应的Alt,即可设置航点高度。
还需要介绍的是,命令。例如WAYPOINT,是最基本的航点指令,飞行器会前往该点,到达该点后会按照下一条命令执行。
我们也可以设置为别的命令,例如LAND,降落,飞行器会在到达该点后,自动降落。
如果不小心点到地图,误添加了一些点,可以在该航点删除

三、写入航点
任务规划完成,用USB连接飞控。连接成功后,点击写入航点。
写入完成。
此时可以通过读取航点,检查设定航点是否一致、正确。
四、执行航线
航点写入成功后,需要飞控切换到AUTO模式才能执行航线。

在扩展调参界面,将通道7选项设置为AUTO。
同时还要将遥控器7通道设置成开关方便使用。
实际操作举例:
前提:飞行器(机架、飞控、GPS、电机、电调及桨叶等)安装正确,完成固件导入及参数调试,能正常起飞。
步骤:
1. 在空旷地带,上电。等待飞控启动完成。
2. 等待GPS搜星,过程大概1-2分钟,搜到星后GPS会闪。
3. 切换到定点模式,按下安全开关,遥控器左下解锁。
(如果解锁失败,说明星数、精度未达到要求,等待搜星)
4. 定点起飞后,即可拨下对应遥控器通道开关,执行AUTO。
关于遥控器及飞控的更多详情请参见乐迪电子官网:
http://www.radiolink.com.cn/docc/index.html
Ardupilot官方 Mission Planning介绍及视频
http://ardupilot.org/copter/docs/common-planning-a-mission-with-waypoints-and-events.html


 Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程
Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程