本章介绍飞行器的组成部分,以及各功能的特点。
乐迪训狼QAV210飞行器主要由飞控系统,遥控系统,定位系统,动力系统,图传系统组成。本章将详细介绍各个部件的功能。
2.1 到手飞版本飞行设置
乐迪训狼QAV210目前有到手飞和单机2个版本。
到手飞版本顾名思义就是收到乐迪训狼QAV210之后,只需要分别给遥控器和飞行器上电,然后进行解锁即可进行飞行操作。乐迪训狼QAV210的解锁分为飞行器解锁和遥控器解锁2个步骤。
2.1.1 遥控器的基本操作
因为飞行器主要是通过遥控器无线操作实现飞行器的所有飞行动作,所以在正式开始飞行之前,我们需要了解遥控器的基本操作。
遥控器也称发射机,与之相对应的是接收机。飞手手中的发射机和安装在飞机端的接收机统称为遥控系统。目前市面上的遥控器基本都是2.4GHz(2400MHz~2483.5MHz)。
遥控器的4个基本通道的定义是不变的,分别为:
一通道副翼,也可以称之为横滚;
二通道为升降也称为俯仰;
三通道油门;
四通道方向也称之为航向。
这四个基本通道由遥控器上面的两个摇杆操控,目前大部分的遥控器都不止四个通道,除了四个基本通道之外,还包含了切换飞行模式、控制云台转动、控制相机拍照等功能的辅助通道,这些指令都会通过遥控器的发射系统,用无线信号传递给飞机,由飞机上的接收模块接收信号,所以我们又常常称5通道以上的通道为辅助通道。
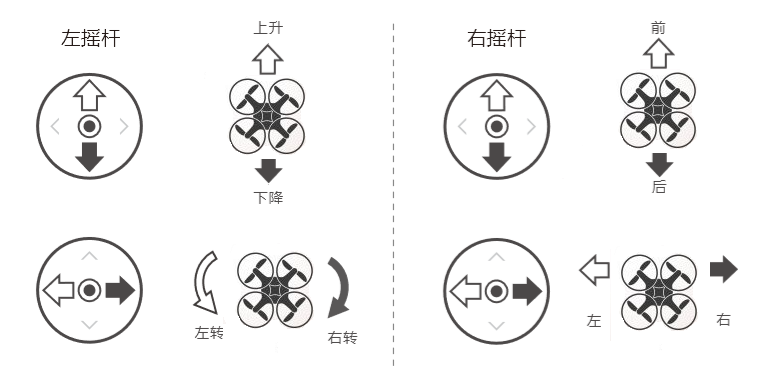
遥控器上左右2个摇杆分别对应4个控制方向。
左边摇杆负责油门(通过上下拨动摇杆来控制飞机垂直方向的上升和下降)和方向(通过左右拨动摇杆来控制飞机顺时针或者逆时针转向);
右边摇杆负责俯仰(通过上下拨动摇杆来控制飞机水平方向的前后飞行)和横滚(通过左右拨动摇杆来控制飞机水平方向的左右侧移),
如下图所示(图中示例为乐迪T8FB;AT9S&AT10II同此操作):

更多T8FB介绍请点击下面的链接查看
http://www.radiolink.com.cn/docc/product-detail-121.html
更多AT9S介绍请点击下面的链接查看
http://www.radiolink.com.cn/docc/product-detail-191.html
解锁步骤如下: (1)遥控器和飞机分别通电成功之后,请确保遥控器油门摇杆处于最低位置; (2)长按飞行器上的安全开关(红色按钮),安全开关的指示灯(红灯)由闪烁变成常亮即可松开。 2.1.2 解锁
2.1.2.1 飞行器解锁

2.1.2.2 遥控器解锁
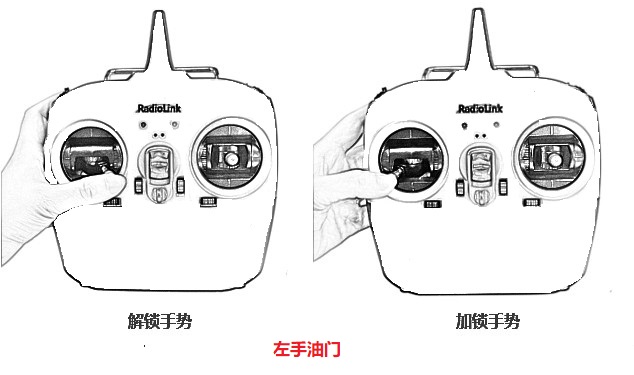
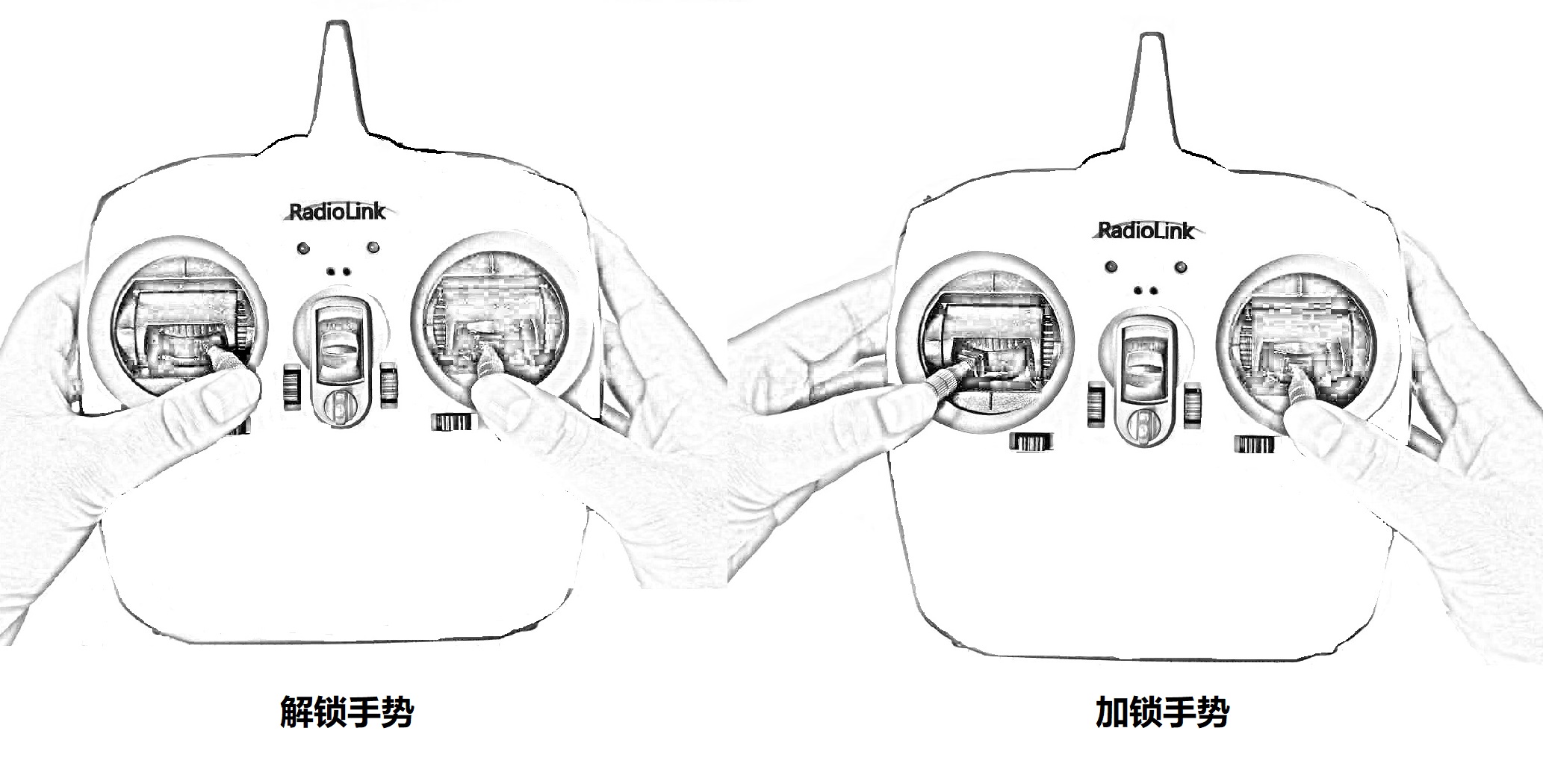
安全开关常亮之后,为了确保安全,请飞行员退到安全位置,检查一下遥控器目前所在的飞行模式,只有在自稳和定高模式下才可解锁成功。检查飞行模式完毕之后,可以进行遥控器解锁。将遥控油门摇杆打到右下角(左手油门)即可解锁成功,遥控器解锁手势如下:
飞行解锁和飞行加锁(以乐迪T8FB为例,AT9S/AT10II同此操作)
左手油门飞行解锁:
左摇杆(油门摇杆)打到右下角,保持2秒左右可以听到飞行器“滴”的一声,飞行器内的飞控状态指示灯为蓝色闪烁,自稳模式下轻推油门(定高模式下需要将油门推过中点),电机和桨叶开始缓慢转动代表解锁成功。
左手油门飞行加锁:
油门最低,方向最左,也就是左摇杆(油门摇杆)打到左下角,保持2秒,飞行器电机停止旋转。
右手油门解锁:
左摇杆打到右下角,油门摇杆打到最低位置,保持2秒左右可以听到飞行器“滴”的一声,飞行器内的飞控状态指示灯为蓝色闪烁,自稳模式下轻推油门(定高模式下需要将油门推过中点),电机和桨叶开始缓慢转动代表解锁成功。
右手油门加锁:
油门最低,方向最左,保持2秒,直至飞行器电机停止旋转。
飞行训练结束之后,飞机返回准备降落的时候,如果您的飞行练习用的是定高模式或者定点模式,建议将飞行飞回降落之后将飞行模式切换成自稳模式,这样上锁更容易操控,飞机返回时将油门打到最低(确保油门摇杆垂直往下)并保持一段时间(5秒左右)待桨叶停止转动再如上图所示上锁,以免急着上锁导致的侧翻或者反复忽上忽下的状况。
遥控器上锁成功之后,在去拿飞行器的时候首先需要将飞行器的安全开关长按至红色指示灯闪烁。
定高模式下,只有当油门摇杆推过中点以上,飞行器才能起飞。当油门摇杆到达中点达到起飞油门,当再继 续推高油门,飞机就能起飞。待飞行器固定在一定高度时,将油门摇杆放回至中点位置,飞行器则会保持在这个高度进行飞行。
2.1.3 飞行模式介绍
训狼QAV210默认有四种飞行模式,自稳模式,定高模式,定点模式和返航模式。
在1小节【遥控器的基本操作】中,我们有介绍遥控器摇杆的基本操作,同时还提到了其他通道的作用,其中一项便是用一个通道来设置飞行器的飞行模式。
T8FB默认三段开关(右侧SWB开关)的拨上为自稳模式,中间为定高模式,下拨为定点模式。二段开关(左侧SWA开关)拨下为返航模式。
AT9S默认右侧三段开关SWC拨上为自稳模式,中间为定高模式,下拨为定点模式。二段开关SWD拨下为返航模式。


2.1.3.1 自稳模式
① 飞手用横滚与俯仰操作控制飞行器的倾斜角度。当飞手松开横滚与俯仰摇杆时,飞行器将会自动恢复水平。在有风的环境中,飞手需要不断的修正横滚与俯仰以让飞行器基本停留在一个位置。
② 飞手操作方向摇杆控制转向速率。 当飞手松开方向摇杆时,飞行器将会保持它的朝向不变。
③飞手的油门输入控制马达的平均转速,这意味着如果想飞行器保持在一定高度,飞手需要不断的修正油门。油门输入会根据模型的倾斜角度自动调整(比如在模型倾斜过大的时候会自动增大油门),以弥补飞手操作飞行器倾斜所带来的高度变化。
2.1.3.2 定高模式
在高度保持模式(简称定高模式)下,飞控会自动控制油门,从而保持高度不变。横滚,俯仰和方向的操作与自稳模式一样,都是直接控制飞机的转动角度和朝向。
定高模式相对自稳模式更简单易操作,因为飞行器飞行时,飞手将油门摇杆推过中点位置待飞行器稳定在一定高度时,将油门放至中心位置,则飞行器就会保持在一个高度不变,飞手只需要推动横滚/俯仰摇杆来实现飞行器的前后左右移动,对新手来说更容易操控和练习。
警告!飞控使用气压高度计测试结果作为高度基准。如果在飞行区域的气压出现变化,飞行器的飞行高度将会受气压变化的影响而不准确,飞行高度就不是实际的高度(除非另外安装了超声波测距,并且飞行高度小于20英尺)。26尺以下使用超声波测距会向飞行器提供更精确的飞行高度。
定高模式下摇杆操控
可以通过油门杆控制飞行器上升和下降的速率。
当油门保持中挡(在40%-60%的地方),飞行器飞行高度不变。
超出这个范围,飞行器会不同程度的(由油门控制)上下浮动。上升和下降最大值是2.5m/s。
定高模式下起飞
定高模式下,只有当油门摇杆推过中点以上,飞行器才能起飞。当油门摇杆到达中点达到起飞油门,当再继续推高油门,飞机就能起飞。待飞行器固定在一定高度时,将油门摇杆放回至中点位置,飞行器则会保持在这个高度进行飞行。
定高模式下降落
定高模式下,要将飞行器降落,只需要慢慢将遥控器的油门摇杆慢慢拉到最低位置,飞行器则会慢慢降落,飞行器降落之后,电机并不会马上停止转动,此时不要马上上锁,否则有可能会导致飞机的翻转坠毁,此时应该等待飞机检测降落,等待10秒左右待电机完全停止转动之后再加锁。切忌刚刚降落就马上外八上锁,这样容易导致飞机侧翻。
2.1.3.3 定点模式
定点模式下,飞行器飞行时会试图自动保持当前位置、指向、高度,也就是飞行器起飞后在飞手不操作摇杆的情况下飞行器会停在一个位置保持不动。当然,同其他飞行模式一样,飞手可以通过控制横滚和俯仰摇杆来实现飞行器的前后左右飞行;如同定高模式,高度可以通过油门控制摇杆来控制,方向可以通过方向摇杆来进行控制。
要实现良好的定点效果,飞行器上面的GPS位置良好、搜星数量、罗盘上低电磁干扰、低振动都是非常重要的。
飞手如果需要用到定点模式飞行或者使用返航功能,请在给飞行器上电后等待1分钟左右(具体的搜星速度与当时的天气状况,地形,时间有关),待GPS搜星数量达到14颗及以上再开始飞行,使GPS的定点及返航效果达到最佳状态。
备注:定点模式下,当GPS搜星数量小于9颗,精度大于1.2米时飞行器则无法解锁成功。
2.1.3.4 返航模式
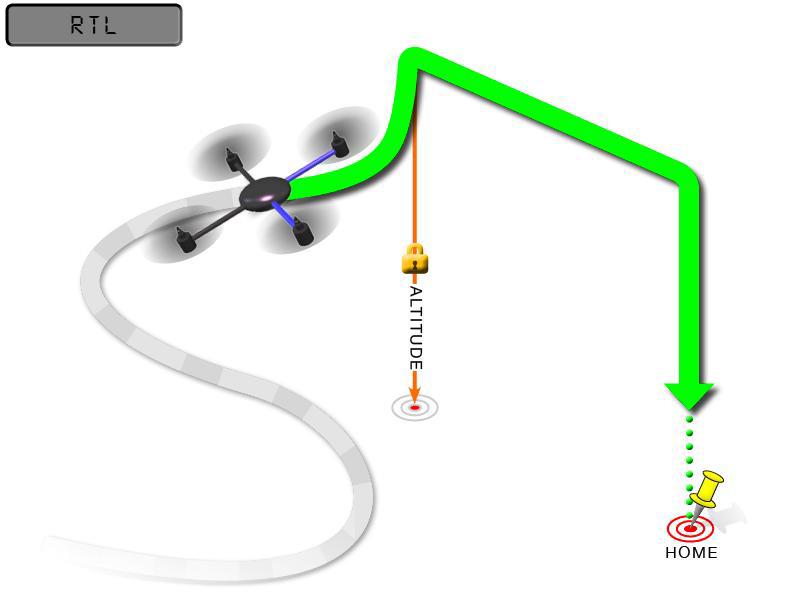
当切换到返航模式时,飞行器会返回家的位置。默认情况下,在返航之前,飞行器会首先飞到至少15米的高度,或者,如果开启返航模式时的当前高度高于15米,飞行器则下降至15米再进行返航。如果您是在有高于15米的阻碍物处进行飞行,请记得在地面站里设置适合的返航高度,具体的设置方法请参考乐迪MINIPIX使用说明书,请点击下面的链接查看MINIPIX使用说明书
http://www.radiolink.com.cn/docc/fcsms.html
返航是依赖于GPS的动作,因此在试图使用这个模式之前,完成GPS定位是必不可少的。返航将命令飞行器回到家位置,换句话说就是它会返回解锁时的位置(起飞位置)。因此,家的位置始终应该是飞行器的GPS实际起飞位置,没有障碍物并且远离人群。
2.1.4 返航触发
训狼QAV210出厂设置默认的返航模式,除了飞行员手动操作,即将拨动SWA开关(T8FB)或者SWD(AT9S)打开返航模式,还有以下两种情况会自动开启返航模式。
① 在遥控失去信号的情况下,训狼QAV210会自动启动返航模式;
② 出厂时我们会设置飞行器低电压返航,所以飞行一段时间后,电池电压低于10.6V(出厂为3S锂电池,低压返航值默认为10.6V)时,飞行器也会自动开启失控返航模式,此时飞行器会自动上升到一定高度(默认为15米),然后降落至起飞点,此时推动遥控器,飞行器是没有反应的,飞行员不必紧张,待飞行器自动降落至起飞点上锁拔掉电池给电池充电即可。
2.2 单机版本飞行设置
到手飞的版本是非常简单的,所有参数包括遥控器参数和飞行器参数均已设置完成,而对应的单机版本则相对会复杂一些。收到单机版本之后,飞行器的参数在出厂时已经设置完毕,但是遥控器因为是飞手原有的,所以需要飞手在收到飞行器之后首先对遥控器进行设置。
购买训狼QAV210单机版的模友需要以下几个部分:飞行器飞控地面站安装,遥控器发射与接收对码与参数设置(乐迪训狼QAV210单机版也支持其他品牌的遥控器和接收机,只需要确保该品牌的接收机支持SBUS/PPM信号即可),电调校准,桨叶安装。
2.2.1 遥控器和飞行器对码
每个发射机都有独立的ID 编码。开始使用设备前,接收机必须与发射机对码。对码完成后,ID编码则储存在接收机内,且不需要再次对码。
如果您手中的遥控器发射机与接收机已经对码完成,那在收到训狼单机之后,只需要将接收机连接至MINIPIX飞控上就可以了。
如果没有对码过,则需要先将遥控器的发射机与接收机进行对码,否则飞行器将无法正常起飞。
乐迪MINI接收机R12DSM/R6DSM支持遥控器AT9S/AT10II/AT9/AT10。
乐迪R8FM接收机支持遥控器T8FB。
所有乐迪系列的遥控器和接收机对码方式都是一样的,具体的对码步骤如下:
(1)将发射机和接收机就近放在一起。
(2)打开发射机电源开关,并给接收机通电。
(3)按下接收机侧面的对码键1秒钟以上直至接收机指示灯开始闪烁就松开,接收机指示灯常亮表示对码完成(接收机未对码成功时,接收机红色指示灯会慢闪提示,此时,只需按上述对码步骤重新对码即可)。
(4)请确认您的舵机可以根据发射机来操作。
对码完成之后,请检查接收机是否切换至SBUS/PPM信号。一般我们常用SBUS信号,乐迪所有接收机均是蓝色指示灯(紫色)为SBUS信号,如果接收机指示灯为红色(PWM信号),则需要一秒内短按对码键2次将接收机的信号进行切换。
2.2.2 飞控地面站下载及安装
在进行飞行参数设置之前,请先安装飞行器的飞控MINIPIX调参用的地面站。如果在此之前已经有安装过可以不用反复进行安装。
① 点击下面的链接下载安装MINIPIX地面站
http://www.radiolink.com.cn/firmware/MissionPlanner/MissionPlnaer-latest.exe
② 安装地面站时会提示需要安装微软的NET组件,可点击下面的链接下载安装
https://dotnet.microsoft.com/download/dotnet-framework/thank-you/net462-web-installer
详细的安装教程也可以点击下面的链接查看
https://v.youku.com/v_show/id_XMzgxMDkxMzA0OA==.html?spm=a2h3j.8428770.3416059.1
2.2.3 遥控器参数设置
训狼QAV210出厂时飞控所有参数均已设置完毕,在收到单机版本时,只需要对遥控器进行摇杆校准,飞行模式设置,故障保护设置。
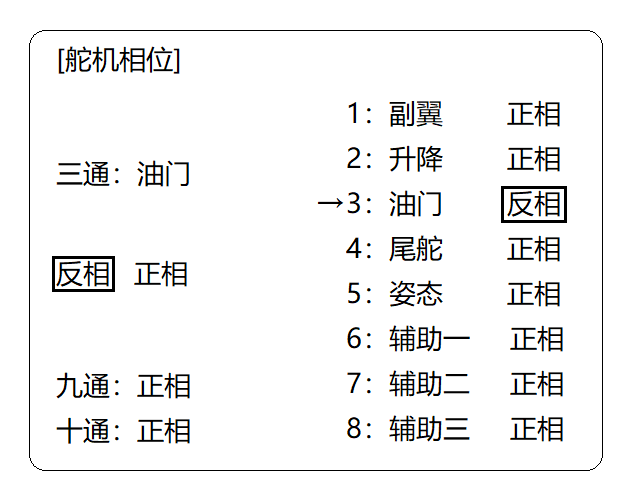
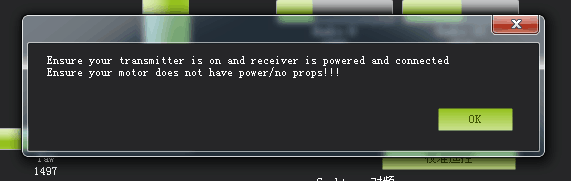
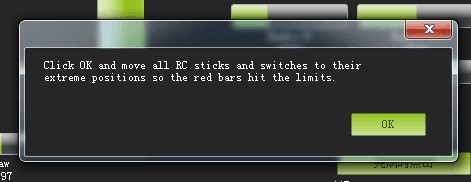
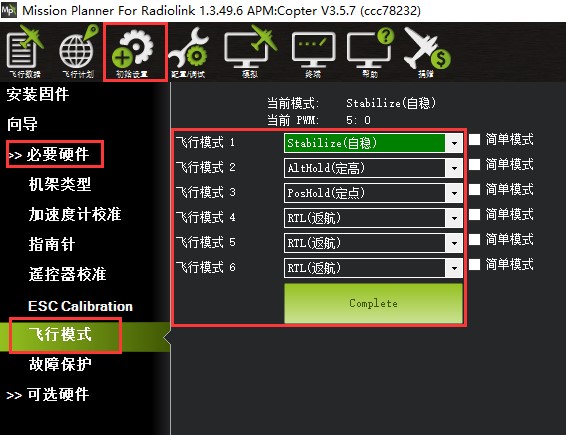
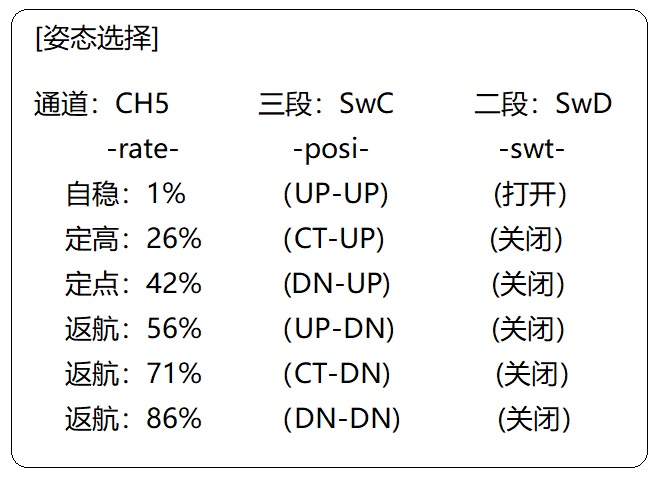
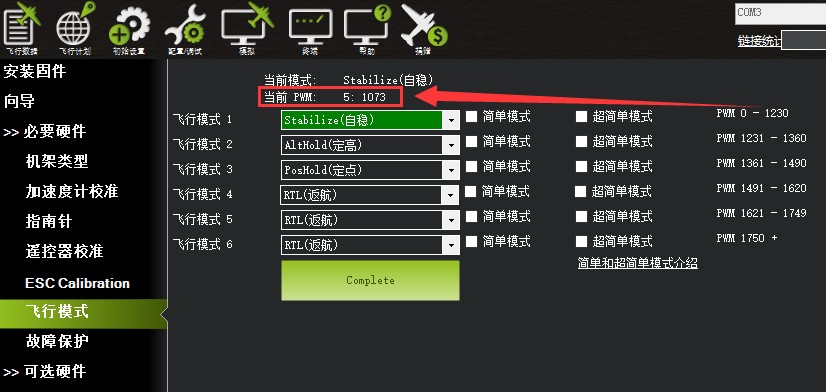
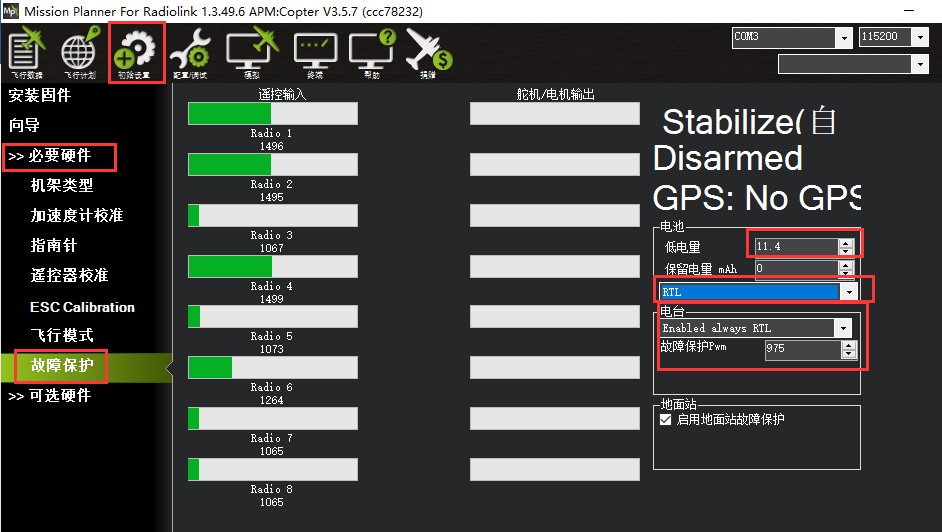
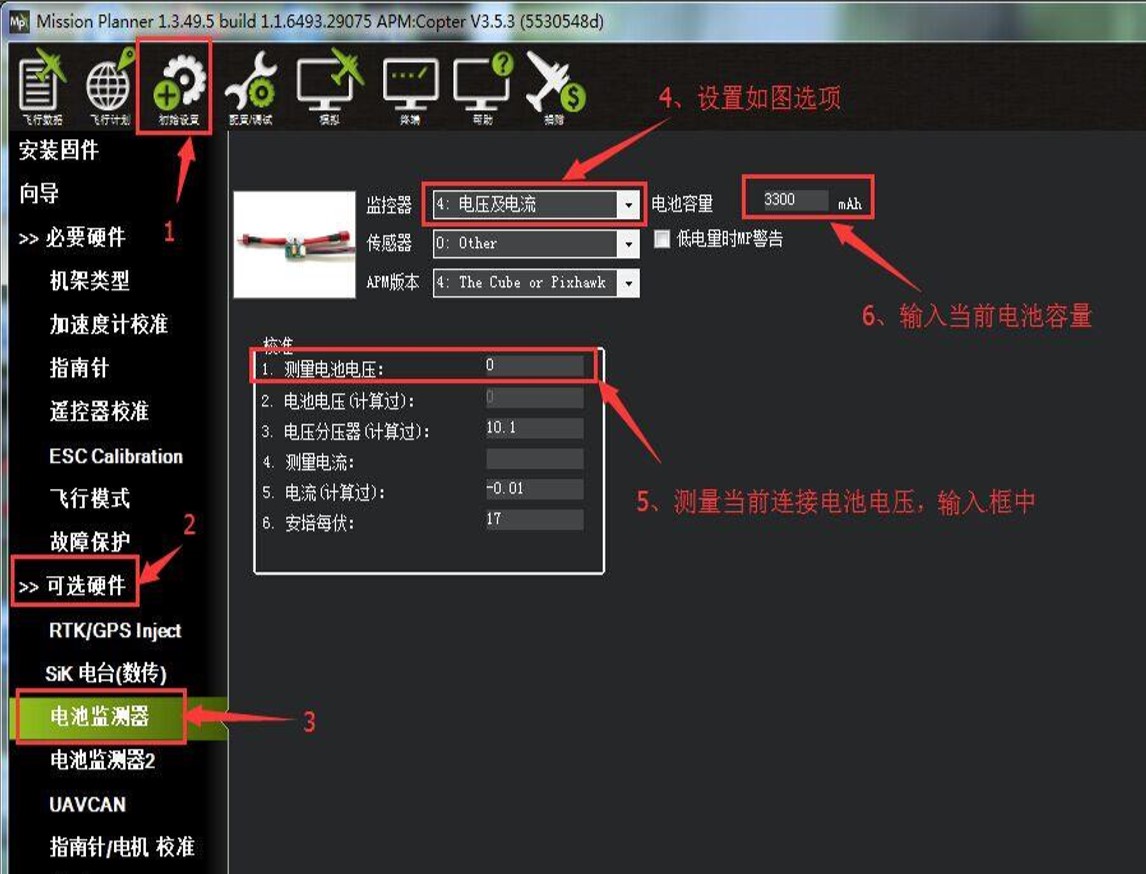
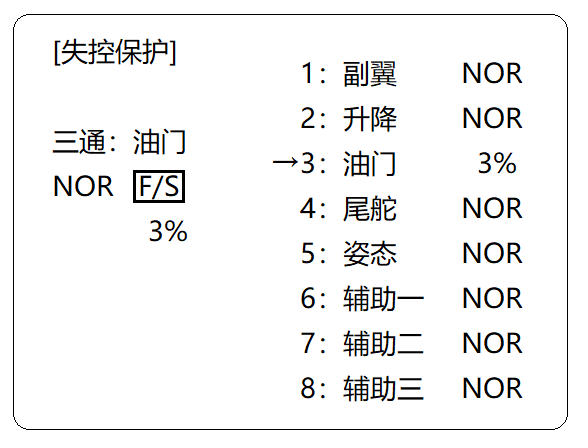
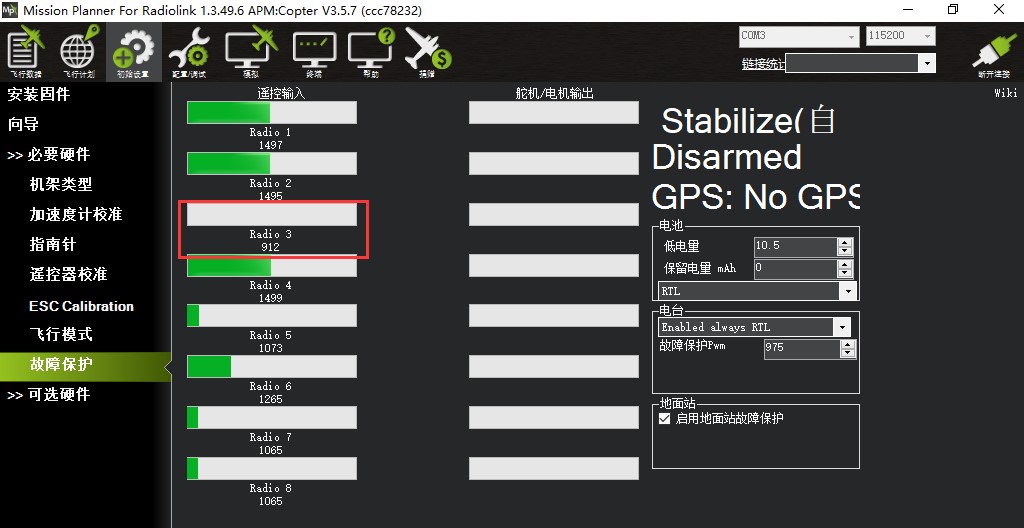
在MINIPIX地面站中进行遥控器摇杆校准之前,请先确保遥控器的机型为多旋翼模型,遥控器相位为反相(示例:乐迪AT9S,T8FB遥控器则可以直接进行摇杆校准,其他品牌遥控器可参考遥控器使用说明书)。 长按 Mode 键一秒进入基础菜单,选择【机型选择】,转动拨盘到机型选项,按 Push 进行选中,拨动拨盘,选择多旋翼模型,按 Push键等待滴滴响声结束即保存模式,之后按 End 退出。 因为对于AT9S遥控器,需要把油门反相(T8FB/AT10II默认为油门反相),所以请按长按Mode键一秒进入基础菜单,选择舵机相位,选择3:油门,按Push选中,拨动拨盘选择到反相,按Push选中保存,按End退出即可。 飞控MINIPIX通过 USB 数据线成功连接地面站(也可以通过数传进行连接,请注意用数传连接的时候波特率请选择为57600,而USB连接的时候波特率需要选择115200),确保遥控器和接收机对码成功,然后打开遥控器电源,当遥控器休眠锁定状态(按键,拨盘无效状态),请按住拨盘中间的Push键进行解锁。 打开MINIPIX地面站,按下图步骤选择好波特率与端口后点击“连接”连接飞控,接着点击初始设置—必要硬件—遥控器校准—点击窗口右边的校准遥控按钮。 注意:每台电脑的端口可能不一样,请选择有效的端口连接。在有多个COM口名称出现的情况下可能会出现失败情况,请先去除其他设备。 点击校准遥控后会依次弹出两个提醒:分别是确认你的遥控器发射和接收已经连接成功并且有上电,确认飞行器没有安装桨叶(为了确保安全,请将飞行器的桨叶拆除直到所有参数设置完毕之后再安装)。 遥控发射端已经打开和接收机已经通电连接,确认你的电机没有通电 确认完毕之后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置 遥控器摇杆校准操作如下(示例为乐迪T8FB,AT9S/AT10II/AT9/AT10同此操作): 将遥控器的两个摇杆(1-4通道)打到最大最小值,如下图所示: 遥控器摇杆校准对应的地面站设置为: 当每个通道的红色指示条移动到上下限位置的时候,点击完成时点击保存校准后,完成遥控器的校准。如果你拨动摇杆时上面的指示条没有变化,请检查接收机连接是否正确,另外同时检查下每个通道是否对应你的发射机应能引起下列控制变化: 通道1: 低 = roll 向左,高 = roll 向右。 通道2: 低 =pitch向前,高=pitch向后。 通道3: 低 =油门减(向下),高=油门加(向上)。 通道4: 低 = yaw向左,高 = yaw向右。 在遥控器里面进行飞行模式配置(乐迪遥控器设置参考下列步骤,其他品牌遥控器设置需要注意,选择5通道作为飞行模式设置,接收机选择SBUS信号即可,飞控在地面站里面的设置同以下步骤) Mini Pix有多种可飞行模式可以选择,但是单机版训狼QAV210飞行器在出厂时飞控端已经设置好了自稳,定高,定点和返航四种飞行模式,所以如果您在不需要更改飞行模式的情况下,只需要将遥控器里面的飞行模式设置同飞行器里面一一对应即可。 T8FB出厂默认参数是根据MINIPIX的飞行参数设置的,所以如果您使用的是T8FB遥控器,则可以省略在遥控器里面设置飞行模式的这个步骤,只需要做摇杆校准和电调校准就可以了。 设置方式如下(以下以为乐迪AT9S为例,AT10II/AT10/AT9设置步骤相同): 遥控器与飞行器对码成功之后,在MINIPIX地面站点击初始设置->必要硬件->飞行模式选择,就会弹出如下的飞行模式配置界面 然后进行遥控器的设置: 首先打开遥控器,长按MODE键进入【基础菜单】,再短按Mode键进入【高级菜单】,按Push键选择【姿态选择】,进入姿态设置页面。 通道选择默认为CH5,设置三段开关为SWC,设置二段开关为SWA或者SWD(具体的开关设置可根据飞手的习惯设置) 注意:在进行飞行模式的PWM值(第二列的RATE数值)设置时,只有posi同时为UP-UP,及swt为打开时(通过拨动SWC开关或者SWD开关来使之打开或者关闭),才可以对数值进行更改。 在地面站飞行模式中设置飞行模式1为stabilize(自稳),设置遥控器姿态页面第一个飞行模式也为自稳,遥控器自稳的参数对应到地面站的参数设置如下: (1)首先查看第一个姿态状态是否打开(即-posi-是否为UP-UP),如果不是,请拨动开关到对应的位置,使-swt-为打开状态; (2)转动拨盘至自稳旁的参数百分比值,按push键选定之后转动拨盘修改参数百分比值; (3)查看地面站飞行模式当前PWM值如图。 设置遥控器PWM量比例,拨盘选中PWM量比例值选项,按Push选中后,拨动调整数据大小,可以跟随看到如图地面站中当前PMW值数据跟随变化,每种模式有其对应的PWM值,当PWM值在这个范围内,当前模式就是这个范围对应的模式,地面站中选中的模式也会变为深绿色,调整遥控器PWM量比例,让当前PWM值在模式限定范围中间,这样一种模式就设置好,模式2,3,4,5,6的设置均同此操作。 从飞行模式4开始需要二段开关的配合,拨动开关到遥控对应的模式下,以步骤3同样方式设置即可。 Mini Pix的失控保护是通过故障保护菜单配置的,进入故障保护菜单时会出现一个提示框,提醒你确保目前未在飞行中,如下图所示: 点击OK后进入设置界面: 触发Mini Pix失控保护的条件有油门PWM,电池电压(需电流计)等可选,当达到触发条件,比如油门PWM值低于设定的值或者电池低于设定值以后,就可以启动失控保护选项了,触发失控保护之后飞行器的飞行动作有RTL(返航),继续任务,LAND(着陆)等。为了确保飞行器飞行安全,我们一般将触发失控保护之后飞行器的飞行动作设置为RTL,也就是失控返航。 设定电池失控保护 根据飞机耗电,电池大小,飞行距离设定保护电压,当低于这个电压后,能有足够电池能让飞机返航,设置低电量值(这个值根据电池大小设置,当你进行远距离飞行,请设置在单节3.7V,电压值3.7*S数,例如:3S动力电池就为3.7*3=11.1V;当近距离则可以设置单节3.6V),设定动作为RTL(返航)即可。 为保证准确实现低电压返航功能,还需要在地面站里面设置电池检测器。 设置电池监测器开启 • 监控器:4 :电池及电压 • 传感器:0 :Other • APM版本:4 :The Cube or Pixhawk 关闭电池检测器设置 • 监控器:0 :disable 当设置开启后,可能出现数据没有的情况,此时请断开飞控连接,重新给飞控上电,之后再打开此界面,输入测量出的电池电压,当2. 电池电压(计算过):框中出现与输入测量值一样的电压,并且不再跳动代表设置正常,当2. 电池电压(计算过):框中出现与输入测量值不一样,请重新打开界面输入测量电压。 注意:当设置不准确后,可能出现无法解锁,或者解锁后,蜂鸣器滴滴快速响的情况,此时代表电源设置错误,请重新正确设置,还有出现一直故障保护情况,此时可能是开启了电池低压保护,电池监测不准确,请重新测量电池电压,并输入正确的电压值。 设定电台失控保护即油门失控保护 设定动作为RTL(返航),设定故障保护PWM(一般不需要更改) 遥控器设置如下: 首先将遥控器油门微调拨动至最小值-120--长按MODE键进入【基础菜单】-- 转动拨盘选择【失控保护】功能--转动拨盘至【3:油门】--将油门摇杆放置最低位置--选择三通:油门F/S--长按PUSH键使得3:油门的百分比值为3%--返回主界面将油门微调值调回中点0。遥控器失控返航设置成功。 遥控器的失控保护设置完成之后,可以通过关闭遥控器的电源开关,在地面站主界面提示“故障保护”,然后在地面站【故障保护】界面查看3通道的PWM值是否低于975,如果低于975则表示遥控器失控保护设置成功,如果不低于975则设置失败,需要您重复刚才的设置动作。 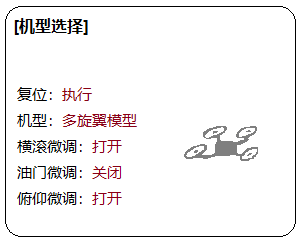



2.2.3.2 飞行模式设置


2.2.3.3 失控保护设置


2.2.4 电调校准(首次飞行)
电调校准基于您所使用的电调品牌会有所不同,所以需要参考您所使用的品牌的电调使用说明书(比如电调校准音调)。在校准电调之前,为了确保安全最好是不要给飞行器安装螺旋桨。
1) 首先确保飞机连接正常并校准完成,能正常解锁;
2) 把遥控器的油门摇杆打到最高,给飞机上电,看见飞控上的LED进行多色闪烁,断开电源;
3) 再次给飞机上电,不要动遥控器,当看见LED多色闪烁,长按安全开关解锁,待听见电调滴滴的叫声后将油门打到最下,听见滴滴叫声后,轻推油门,电机转动则校准正常,如没有,请重新按上述步骤校准或者连接地面站按地面站上的电调校准提示方式进行校准。
所有上述参数设置完成之后,就可以安装飞行器的螺旋桨,并进行解锁飞行,解锁方式同 2.1.1 到手飞版本飞行设置。
2.2.5 桨叶安装
训狼QAV210穿越机单机版本因为包装的原因出厂时是没有安装桨叶的,所以我们在收到飞机后,将所有参数设置完毕,电调校准完成,接上电池测试可以成功解锁后,就可以安装好螺旋桨准备起飞了。在安装螺旋桨的时候请注意一定不要将螺旋桨装反,否则会不能正常起飞或者出现侧翻炸机的现象。
如下图示:在安装桨叶的时候,将摄像头的一端朝前,确保1号电机和2号电机的桨叶为逆时针旋转,3号电机和4号电机上的桨叶为顺时针旋转。
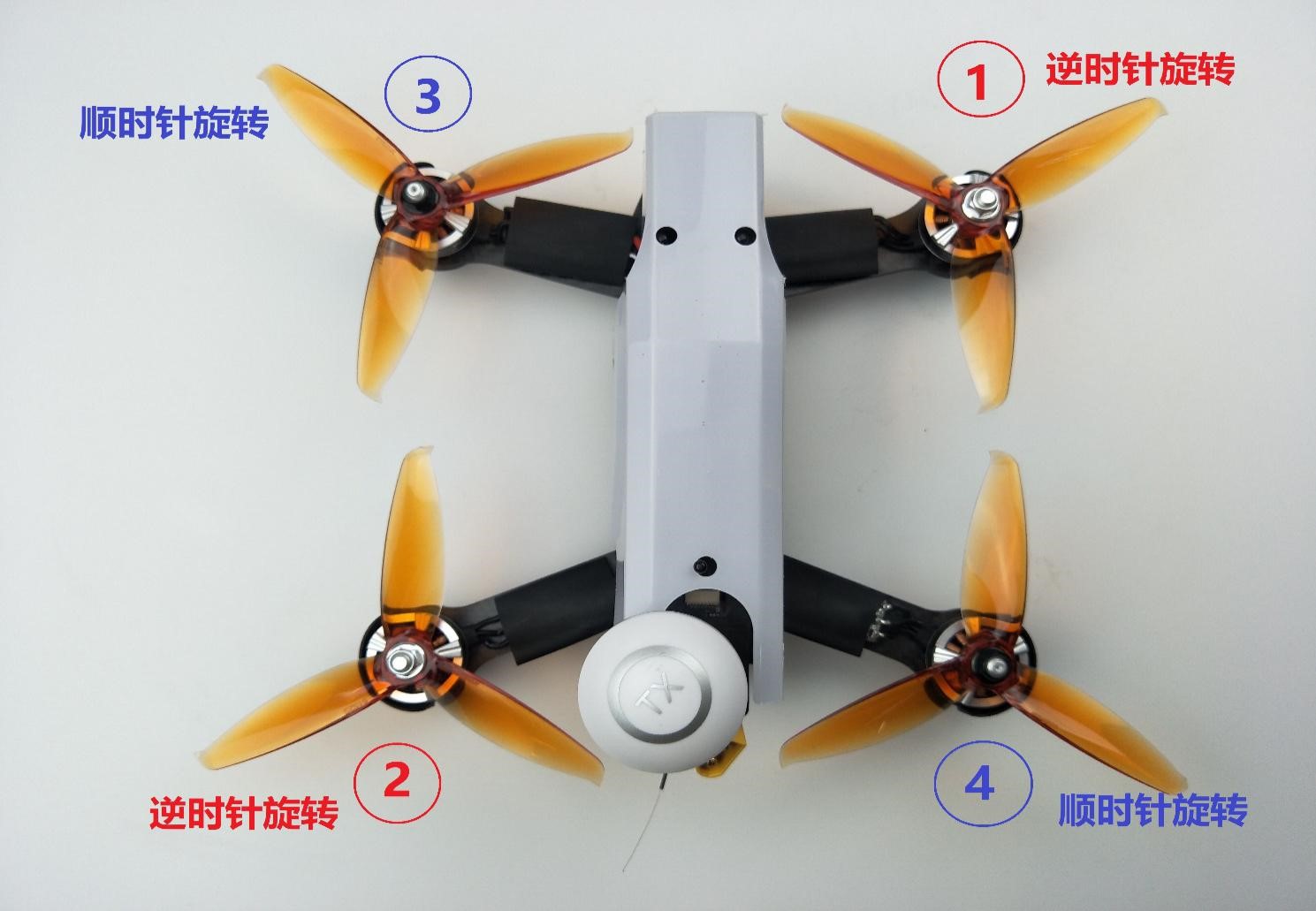
注意:我们在进行飞行器调参的过程中,一定不要安装桨叶,确保调机过程中的安全。
训狼QAV210穿越机出厂时已经配备了乐迪MINI M8N GPS TS100, 如果需要用到定点和返航功能,则需要到室外空旷地带,待GPS搜到星之后方可实现定点和返航。
GPS TS100绿灯闪烁代表已经搜到星了,首次外场飞行的时候,给QAV210穿越机上电之后请稍微等久一些(大约1分半到2分钟的样子,阴天需要等待的时间会稍微久一些,以确保搜星星数到18颗或者以
上,这样定点和返航的精度会更高。
2.2.6 飞行时的注意事项
u 解锁成功之后,正式飞行之前要注意自己退开一些,保证自己在安全距离外;
u 飞行的时候请在室外没有人的空旷地;
u 开始飞行时不要猛推油门,轻轻推就好了;定高模式下起飞,请将油门推过中点位置,这时训狼QAV210会慢慢起飞,飞机起飞之后,请慢推油门,飞机则会继续上升。待飞机飞到一定高度之后,请停止继续推油门的动作,将飞机悬停在这个高度,这时,只需要修正前后左右方向即可。
u 飞行或者试飞过程中即桨叶旋转状态下,不管飞机出现什么状态,千万不要用手或者自己身体的任何部位去接触飞机,一定要确保自己的人身安全;
u 飞行结束后,请一定确认上锁成功,桨叶不转的情况下再去给飞机拔电;
u 如果在没有飞行经验的情况下,如果周边有老模友,可以一起先去试飞几次。

2.3 充电器的使用
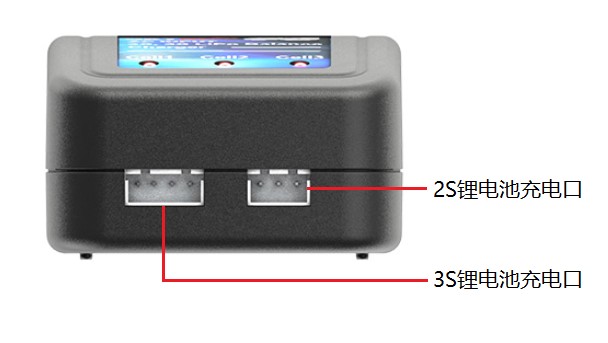
训狼QAV210到手飞版本标配一个SKYRC E3充电器,E3内置充电电源,可以直接连接至100-240V充电口充电,支持2S-3S锂电池充电。功率为11W,最大充电电流为1.2A.
充电步骤如下:
① 将标配的充电连接线连接至SKYRC E3。
② 将标配的充电连接线另外一端连接至240V标准插座口。
③ 将电池的平衡线连接至E3充电器上的充电口,等待2秒左右之后,充电器检测完电池电压并开始充电。
④ 充电器上的LED指示灯持续红灯常亮表示开始充电状态。如果是2S锂电池充电,E3充电器上的1S和2S LED指示灯保持红灯常亮的状态,如果是3S锂电池充电,E3充电上的1S,2S和3S的LED指示灯则都保持红灯常亮的状态。
⑤ 当一片电芯充满时,对应的LED指示灯则由红色指示灯常亮变为绿色指示灯常亮。2S电池充满时,1S和2S对应的LED指示灯由红灯常亮变为绿灯常亮;3S锂电池充满时,1S,2S和3S对应的LED指示灯均由红灯常亮变为绿灯常亮。
⑥ 拔掉充满电的电池时,充电器的状态指示灯将保持绿色指示灯常亮的状态,当充电状态指示灯变为红色指示灯闪烁时,表示充电器即将开始另外一块电池的充电。
注意①:当你拔掉正在充电的电池时,充电器将自动停止充电。
注意②:充电器在充电过程中如果过载或者短路,充电器将停止充电,且3个指示灯会持续红灯闪烁。
LED指示灯状态 充电器状态 指示灯绿灯闪烁 待机 指示灯红灯常亮 正在充电 指示灯绿灯常亮 充电完成 报错提示: 当充电器的指示灯红灯闪烁时则为报错提示,这时,请将连接至240V充电口的连接线拔掉,然后将电池从充电器上拔下来。 LED指示灯状态 充电器报错原因 所有指示灯红灯闪烁一次,停顿一秒后再闪烁一次,如此循环往复 电池连接错误 所有指示灯红灯闪烁两次,停顿一秒后再闪烁两次,如此循环往复 充电器过载或者短路 所有指示灯红灯闪烁四次,停顿一秒后再闪烁四次,如此循环往复 充电电池的单片电芯电压过高或者过低 所有指示灯红灯闪烁六次,停顿一秒后再闪烁六次,如此循环往复 同时充电的2个电池组电压差为300mv 技术参数
电压输入:100-240V,50-60Hz
电池类型:锂电池
支持电池节数:2S/3S
充电电流:最大1.2A
充电精度:0.02V
功率:11W+-10%
使用安全须知:
① 如果电源口和充电口有损坏,请联系SKYRC厂家返厂维修,不可在损坏的情况下使用。
② 此充电器仅支持锂电池充电,请勿使用此遥控器给其他类型的电池,否则会导致充电器损毁。
③ 确保充电安全,充放电时务必在视线范围内进行。若需离开,应取出电池,避免不可预防的危险和损失。
④ 充电器输入电压为100-240V,切勿超过充电器能承受的电压范围。
⑤ 请勿将金属或者导线物体落入充电器内部。
⑥ 若电池出现漏液,鼓包,外皮脱落、颜色改变或者变形等异常,请勿进行充放电。
⑦ 请勿将不同类型、不同容量、不同厂家的电池混合充电,连接电池时注意不要接反。
⑧ 请勿改造或拆卸充电器。
⑨ 使用时请勿将充电器或电池置于易燃危险物附近,不要在地毯,纸张,塑料制品,乙烯基塑料,皮革,木料上充放电,也不要在航模内部或汽车内部充放电。
⑩ 请不要在阳光直射、密闭空间或者高温的环境中使用。在以上这些情况下,充电器内部的温度保护机制可能起作用,使充放电不能正常进行。
⑪ 请勿试充不可充电的干电池。
⑫ 请勿超出电池制造商规定的充电最大极限以及安全忠告。


 Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程
Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程