


































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
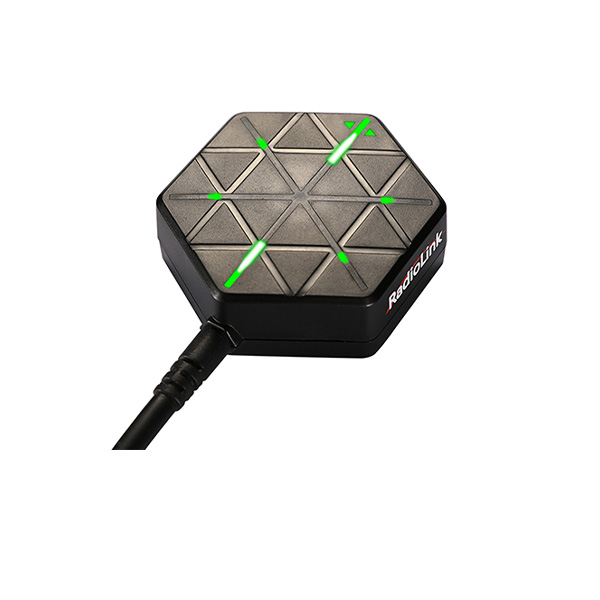
Specifications
Dimension: | 20*22*19mm(0.79"*0.87"0.75") |
Weight(With wires): | 8g(0.28oz) |
Input Voltage: | 4.5~5.5V(High Voltage NOT supported) |
Current: | 18mA@5V |
Power: | 90mW |
Operating Temperature: | -30~85℃ |
Detected Distance: | 40cm~450cm(15.75"~177.17") |
Detecting Precision: | 0.4cm(0.16") |
Detecting Frequency: | 40±1.0KHz |
Beam angle: | 60°(transceiver) |
Fade Area: | 40cm(15.75", read as 0 fade area by flight controller) |
Output: | I2C |
Work Cycle: | 30ms |
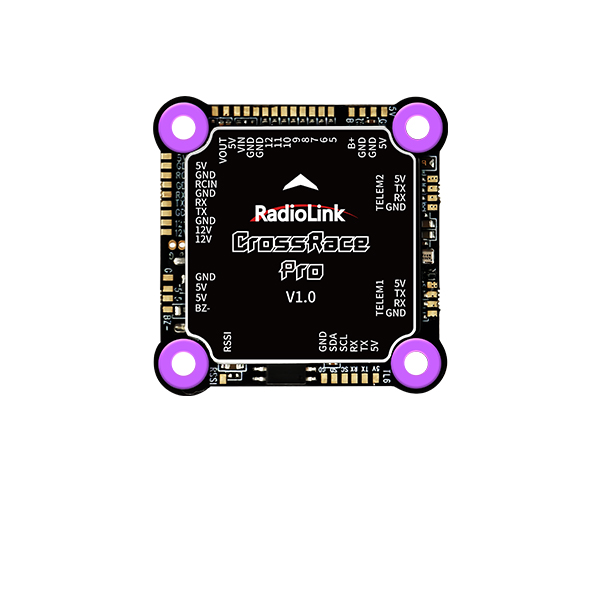
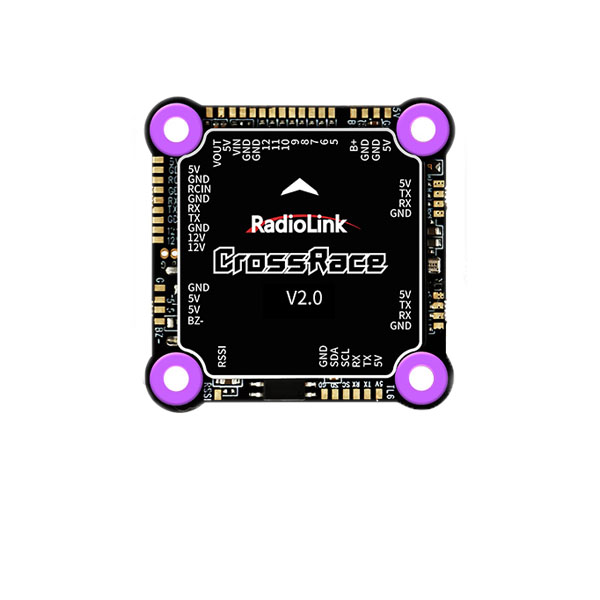
Flight Controller Compatibility: | PIX6, CrossFlight, CrossFlight-CE, CrossRace Pro, CrossRace |
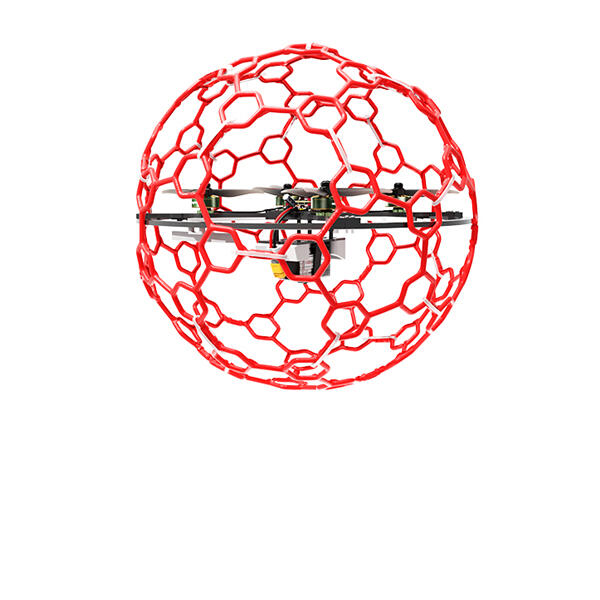
Model Compatibility: | Multirotors |
Obstacle Avoidance Directions: | Maximum 6 directions: It can realize obstacle avoidance in directions forward, backward, left, right, upward, and altitude-hold to downward at the same time when working with the I2C expansion board. |





 简体中文
简体中文- English