



































































Multicopter-4.6.3.apj
1.21 MB
FC for Fixed Wing
GPS
RTK Kit
12C Boards
Ultrasonic Sensor
Digital Video
Transmission Adapter Board
NEW
Flight Controller(Mission Planner)
NEW
 简体中文
简体中文 English
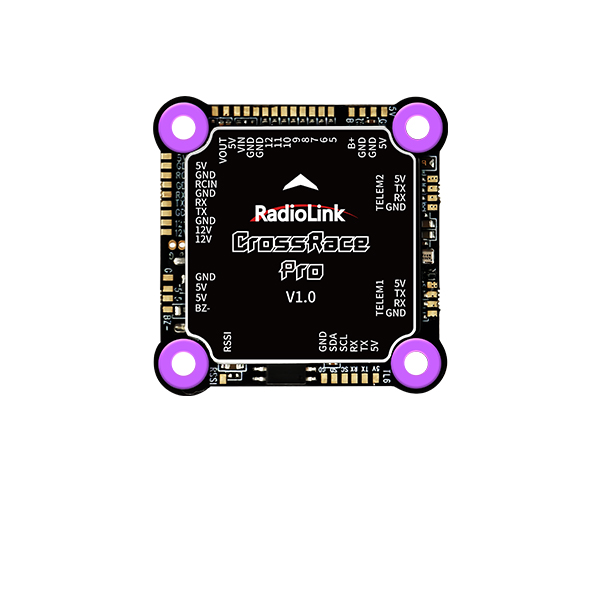
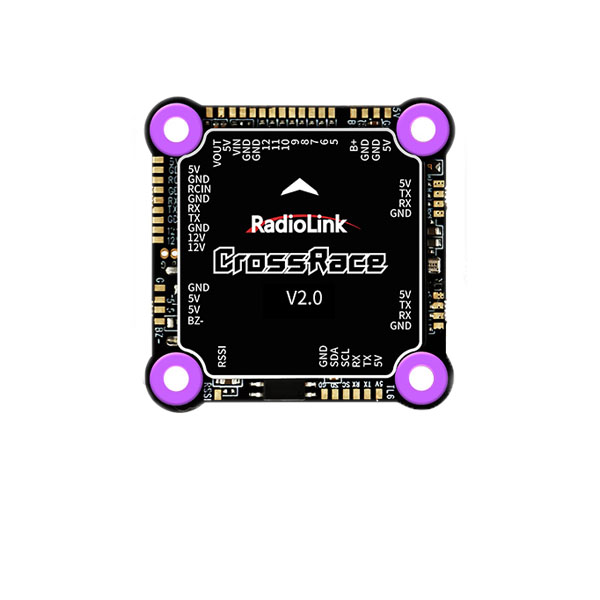
EnglishFirmware for CrossFlight-CE
The latest firmware from RadioLink
Multicopter-4.6.3.apj 1.21 MB | 2025-11-17 |
Airplane-4.6.3.apj 1.2 MB | 2025-11-17 |
HeliCopter-4.6.3.apj 1.21 MB | 2025-11-17 |
2025-11-17 | |
AntennaTracker-4.6.3.apj 891.55 KB | 2025-11-17 |
Latest Firmware (V4.6.2) Upgrade Instructions
ArduPilot Copter Release Notes:
------------------------------------------------------------------
Release 4.6.3 04-Nov-2025 / 4.6.3-beta1 14-Oct-2025
- ARK FPV, ARK Pi6X, and ARKV6X Extended Range support
- Blitz Wing H743 and H743 Pro I2C pullup fixes
- Blitz Wing H743 and H743 Pro now use SPA06 barometer
- CUAV-7-Nano now uses IIM-42653 accel/gyro
- DAKEFPV H743 and H743 Pro support
- Orqa FC 3030 H7 QuadCore support
- SequreH743 now uses DPS310 and DPS368 baro
- SIYI N7 now uses ICM45686 accel/gyro
- SPEDIX H743 analog VTX enabled
- TBS LUCID H7 fix VSW control
- TBS Lucid H7 Wing AIO support
- ZeroOne X6 bi-directional DShot support
2) Driver bug fixes and enhancements
- DJI goggles support for iNAV multi-page fonts
- Gremsy mounts cope with NaN in device information
- OSD can now be controlled over DroneCAN serial passthrough
- Correct setting of deadzone on RC tuning channel
4) Plane specific fixes and enhancements
- Added option to disable IMU check with ICE running
- Fix landing flare when using rangefinder
- Fix landing slope when when a rangefinder exists, but is not in use
- Improve TECS behavior when using MIN_GROUNDSPEED
- Make RNGFND_LANDING a bitmask
- Quadplane terrain avoidance applet
- Remove roll-rate limit in fixed-wing recovery
5) Bug Fixes and minor enhancements
- Correct starting of CAN multicast server
- Data race in parameter creation fixed
- ECC check no longer causes firmware wipe if error is recoverable or if only param pages impacted
- FFT uses primary gyro instead of first available
- GPS blending fix when one GPS loses lock
- Harmonic notch filter fixes for scripted motor mixers
- Lua applet for arming checks
- Lua binding for getting rally points
- More BLHeli passthrough fixes
- Networking stack overflow (and subsequent watchdog) fixed
- Pre-arm check for system initialization
- Printing extremely small numbers no longer causes an infinite loop
- Raspberry Pi 5 board-type detection fixed
- Scripting fix for parameter indices being registered out of order
Attention: If you can not download the files when clicking the files above, please click the website below to download the files you need.
Firmware: http://www.radiolink.com.cn/firmware/flight_controller/crossflight_EN/
 简体中文English
简体中文English



