
Chapter 1. Overview
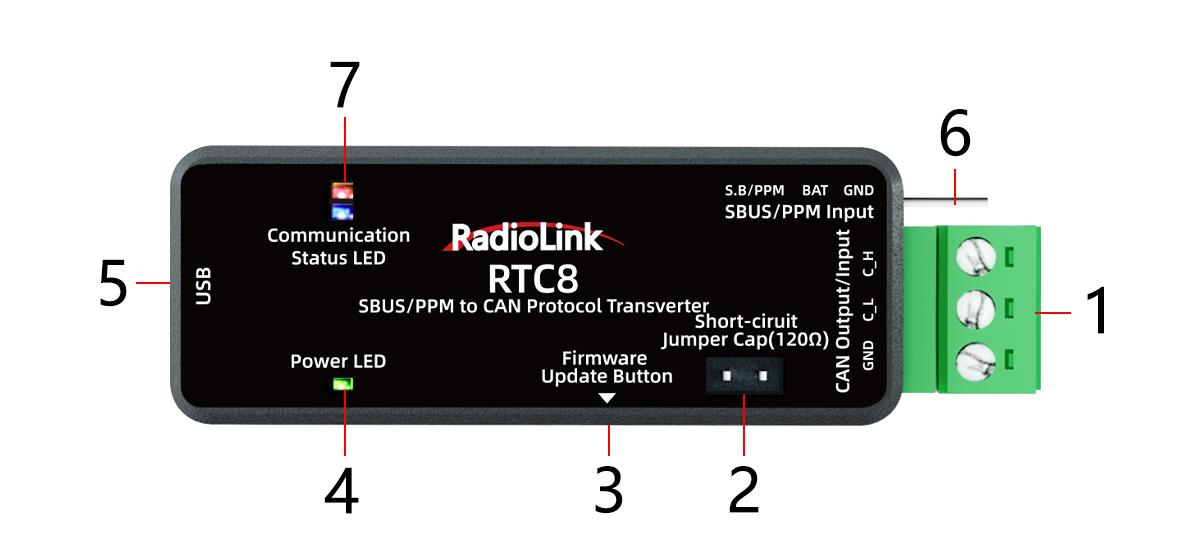
CAN receive/send interface:
Used to send and receive CAN data.
Working baud rate range is 5Kbit/s ~1Mbit/s.
2. Termination resistor 120Ω
The short-circuit jumper cap can absorb signal reflection and echo.
3. Firmware update button
Press and hold the button, then connect the encoder to the computer via USB to enter the firmware update mode.
4. Power Indicator
Lights up in green after the encoder is powered on.
USB connector
Connect with computer for parameter adjustment and data observation.
Update the firmware after connecting with the computer.
6. SBUS/PPM input
SBUS signal input
PPM signal input
7. Communication status indicator
When the SBUS signal is input, the blue light flashes 2 times and goes out.
When the PPM signal is input, the blue light flashes 3 times and goes out.
When receiving valid CAN data (unshielded ID data) the red light flashes 2 times and goes out.
Chapter 2. Specifications
1. The PC interface conforms to the specification of USB2.0 full-speed interface and is compatible with USB1.1 and USB3.0.
2. Integrate 1 CAN-BUS interface, and use plug-in terminal wiring method
3. Conform to IOS/DIS 11898 specification
4. CAN-BUS communication baud rate can be freely programmed between 5Kbps~1Mbps
5. Powered by USB/5-15V
6. The received data flow rate is up to 100fps
7. Support Windows 7, 8, 9, 10 and other Windows systems
8. Support SBUS_PPM_TO_CAN test software
9. Support SBUS and PPM signal analysis
Chapter 3. Main Functions
1. Data receiving function
2. Received data display function
3. Data clearing function
4. Filter function
5. Advanced shielding function
6. Data sending function
7. SBUS/PPM signal to CAN signal
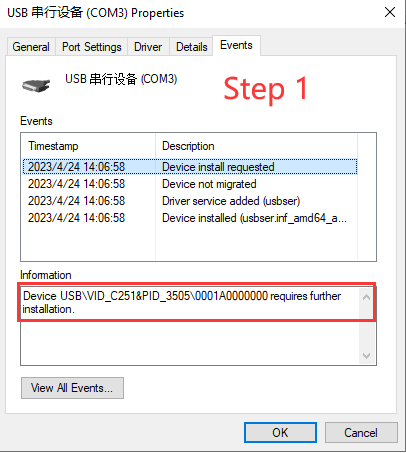
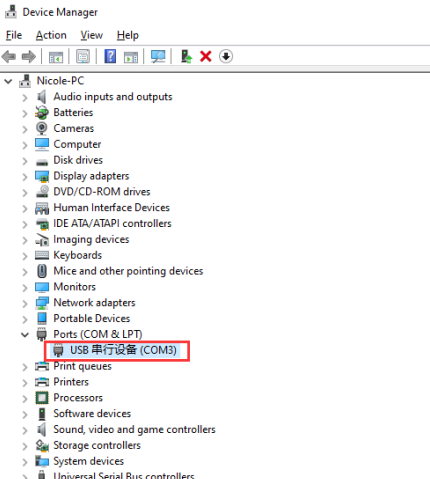
Chapter 4. Driver installation
1. Use a USB cable to connect the SBUS/PPM to CAN Protocol encoder to the computer.
2. After the successful connection, there will be a new COM port in computer device manager.



Chapter 5. Firmware update
Press and hold the firmware update button(do not supply power to the encoder). Then connect the encoder to the computer via USB, the blue light will start to flash. Release the firmware update button.
2. The computer pops up a window asking whether the U disk needs to be formatted, and you can directly close the window.
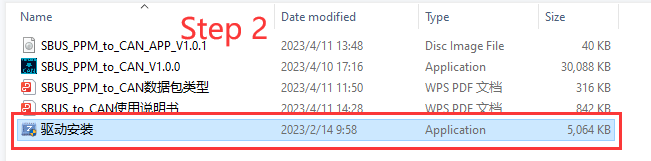
3. Open the firmware upgrade software.

(1) Select the disk that just popped up.
(2) Select the firmware to be updated.
(3) Write the program, and it will pop up “Write Successful”.
(4) Unplug and re-insert the USB to confirm whether the upgrade is successful.
Note: If the blue light is on and the red light flashes quickly after power-on again, the firmware is abnormal. Please confirm that the firmware is correct, and then repeat the above update operation.
Chapter 6. SBUS/PPM to CAN Explorer

Status information display
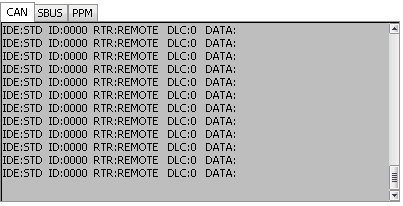
(1) CAN:
Display currently received CAN data (after filtering ID).
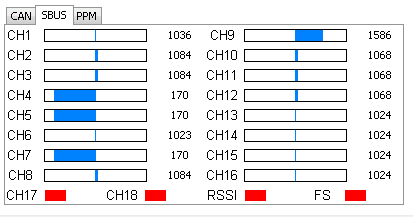
(2) SBUS:
If there is an SBUS signal input, the SBUS channel data will be displayed.
(3) PPM:
If there is a PPM signal input, the PPM channel data will be displayed.

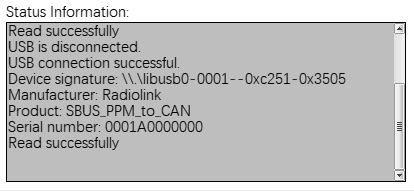
Debug/Status information
Parameter configuration
Notice!
① Each time the device is connected, the parameters will be automatically obtained once and sent to the computer.
②All parameters must be written after modification. Click "Optimset" in the lower right corner, otherwise the parameters will not be set successfully.
(1) CAN Timing


①Preset baud rate selection: After selection, BS1, BS2, BRP, and SJW parameters will be automatically set. When the preset value does not meet the requirements, parameters of BS1, BS2, BRP, and SJW can be manually adjusted according to the actual situation.
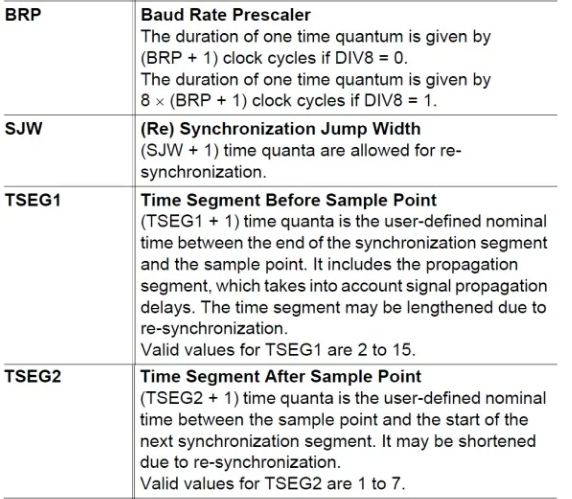
②BS1(TSEG1): Bit segment 1
③BS2(TSEG1): Bit segment 2
④BRP: The duration of one time quantum
⑤SJW: (Re)synchronization jump width (The larger the value is set, the larger the baud rate error is allowed.)
Note:
① The synchronization segment is always 1.
② PTS and BS1 have been merged, so the width of BS1 is equal to the width of PTS+BS1.
③ Sample: Automatically calculate sampling points according to BS1 and BS2.
Configuration references:
https://blog.csdn.net/piaolingyekong/article/details/124276670
(2) CAN Acceptance Filter
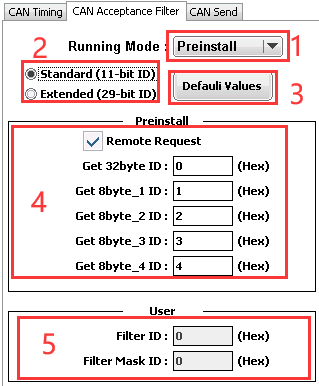
①Running Mode
Preinstall: Only receive data matching the 5 IDs of the preset configuration.
(1) Respond after receiving Get 32byte ID, and then send 32 data continuously.
(16 channels, 2 bytes per channel)
(2) Respond after receiving Get 8byte_1 ID, and send 8 data.
(1-4 channels, 2 bytes per channel)
(3) Respond after receiving Get 8byte_2 ID, and send 8 data.
(5-8 channels, 2 bytes per channel)
(4) Respond after receiving the Get 8byte_3 ID, and send 8 data.
(9-12 channels, 2 bytes per channel)
(5) Respond after receiving Get 8byte_4 ID, and send 8 data.
(13-16 channels, 2 bytes per channel)
2. User: Receive data according to the configuration of (match ID) and (mask ID). Only reply. No additional data is sent.
3. Silent: The working mode ID data before selecting the Silent mode can be received, but it
will not send a response signal.
Note: Only remote frame data is received in this mode.
②ID Mode:
Standard(Standard ID) , with ID range of 0-7FF
Extended(Extended ID), with ID range of 0-1FFFFFFF
Note: It is prohibited that all 7 bits are recessive. (Prohibited setting: ID=1111111XXXX)
③Default Values
Click and all parameters on this page will be restored.
④Preset ID
The ID that receives the channel data (Refer to Preinstall).
⑤User Filter ID setting
If you only want to receive the standard frame whose CAN ID is 0x317, the setting method is as follows:
Filter ID: Set to the binary bit 011 0001 0111, corresponding to 317.
Filter Mask ID: Set to the binary bit 111 1111 1111, corresponding to 1FFFFFFF
If you want to receive standard frames whose CAN ID is 0x310 to 0x317, the setting method is as follows:
The meaning of each bit in Filter Mask ID:
(1) Bit x is set to 1, and the bit x of the received ID must be consistent with the bit x of the Filter ID, otherwise it will be ignored.
(2) Bit x is set to 0, regardless of whether the bit x of the received ID matches or not, as long as all the bits of 1 match, the data will be received and responded. Assuming that the Filter Mask ID is set to 0, all messages will be received and responded.
(3) CAN Send
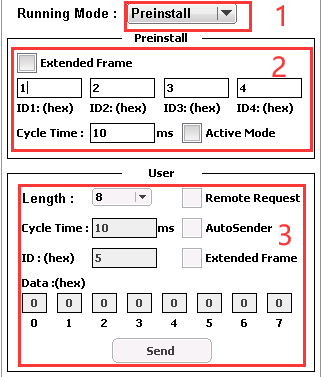
①Running Mode: (Consistent with CAN Acceptance Filter)
②Preset mode parameters:
(1) With Extended Frame not ticked, the ID range can be set from 0 to 7FF
(2) With Extended Frame ticked, the ID range can be set from 0 to 1FFFFFFF
Note: It is prohibited that all 7 bits are recessive. (Prohibited setting: ID=1111111XXXX)(3) ID1: ID that sending data of channel 1-4
(4) ID2: ID that sending data of channel 5-8
(5) ID3: ID that sending data of channel 9-12
(6) ID4: ID that sending data of channel 13-16
(7) Cycle Time: The cycle of actively sending channel data
(8) Active Mode: Active sending mode. When Active Mode is ticked, there is no need to send the command to obtain data to the SBUS/PPM to CAN Protocol encoder, and the device will periodically send channel data to the CAN bus at the time set by Cycle Time.
③User Mode Parameters
(1) Length: User-defined data sending length
(2) Remote Request
(3) Cycle Time: The cycle of automatically sending channel data
(4) AutoSender: Automatic sending mode. When AutoSender is ticked, the device will periodically send the set user data to the CAN bus at the time set by Cycle Time.
(5) ID: ID of sent data
(6) With Extended Frame not ticked, the ID range can be set from 0 to 7FF
(7) With Extended Frame ticked, the ID range can be set from 0 to 1FFFFFFF
Note: It is prohibited that all 7 bits are recessive. (Prohibited setting: ID=1111111XXXX)
(8) Data: The data to be sent
(9) Send: Send data key. Data is sent every time it is clicked.