How to control a servo from Mini Pix, CrossFlight, CrossFlight-CE, PIXHAWK, PIX6 ESC pins by the transmitter?
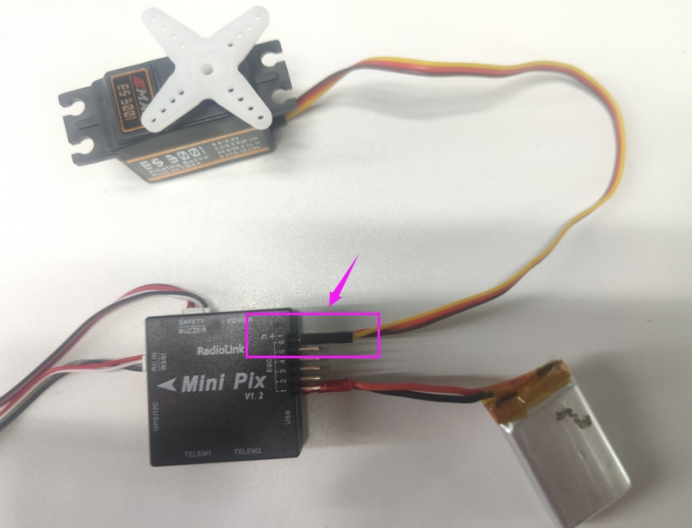
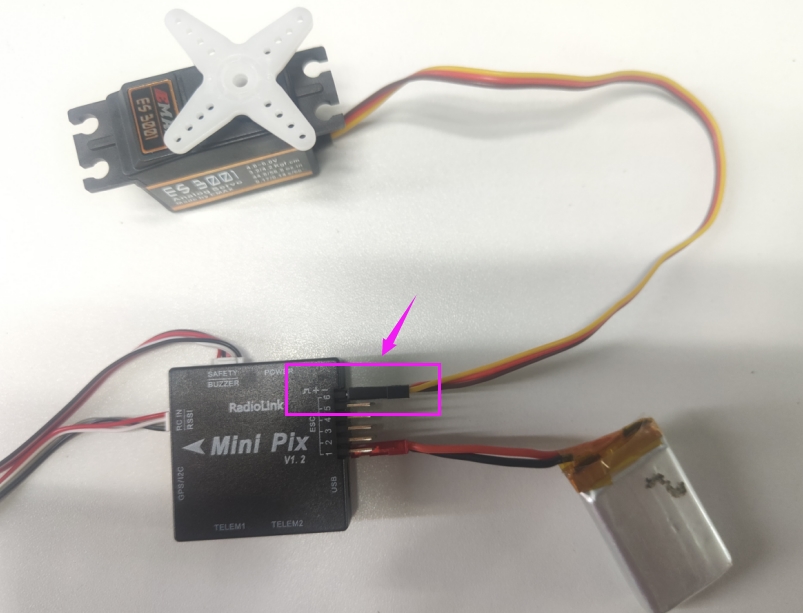
Take a quadcopter as an example. The servo is connected to the pins of ESC6:
Pins of Mini Pix ESC 1/2/3/4 are connected to the four ESCs on the aircraft, and ESC 5/6 can be connected to a servo separately. The transmitter is used to control the servo.
Pins of CrossFlight ESC 1/2/3/4 are connected to the four ESCs on the aircraft, and ESC 5/6/7/8/9/10 can be connected to a servo separately. The transmitter is used to control the servo.
1. Connect the servo to Mini Pix ESC 6.
2. Connect Mini Pix in Mission Planner.
Check the detailed manual of Mini Pix for connection:
https://www.radiolink.com.cn/minipix_manual
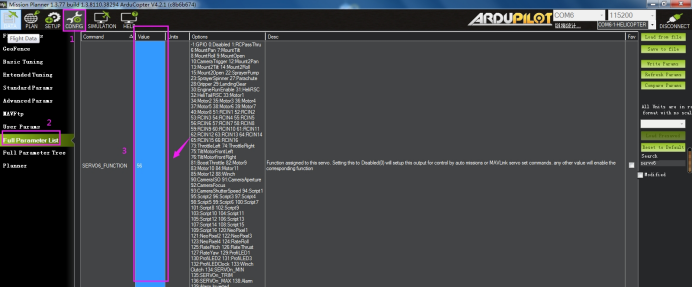
3. Set Parameters in Mission Planner
Keep the ESC6 of Mini Pix/CrossFlight with the same servo amount of channel 6 in the transmitter.
Set steps in Mission Planner as:
Select Hardware Configure -- Full Parameter List -- Search "servo6”" -- Change the Value of SERVO6_FUNCTION to 56 (56:RCIN6)

4. Arm the aircraft
Mini Pix/CrossFlight arms successfully first and then the transmitter controls the servo on ESC 6 of Mini Pix.
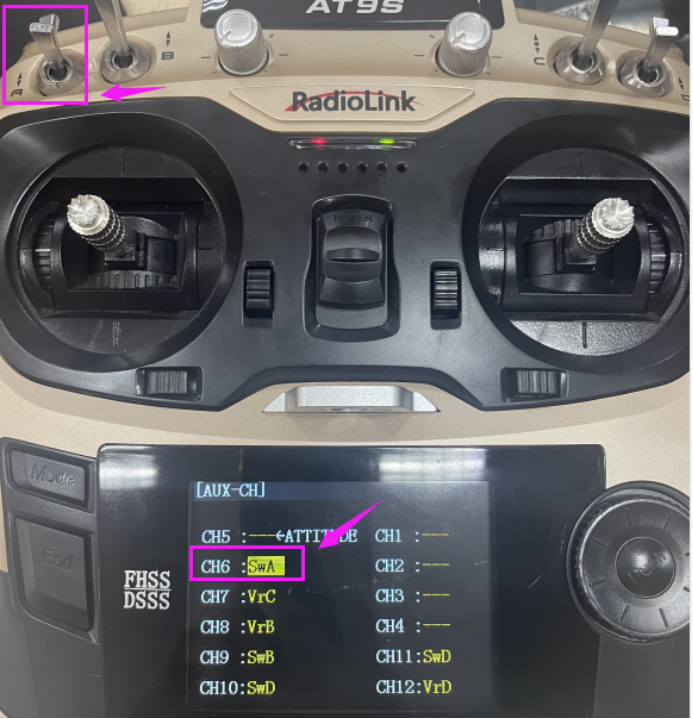
5. Transmitter control
Check which switch is assigned to control channel 6 in the auxiliary channel of the transmitter, and then control the servo of ESC 6 on Mini Pix/CrossFlight with the switch. Take below AT9S as an example: Channel 6 (SwA switch) controls the servo on ESC 6 of Mini Pix/CrossFlight.

Note:
You must arm the controller first if you use a Mini Pix/crossflight flight controller. Then the transmitter can control the servos connected to Mini Pix/CrossFlight. If you use a PIXHAWK flight controller, the transmitter can control the servos connected to PIXHAWK without arming.
6. Power supply
Since the standard power module of the Mini Pix/CrossFlight cannot directly supply power to the devices on the pins of the Mini Pix/CrossFlight, if the pin is connected to an ESC without BEC (ESC 5V output) (The ESC can get power from power module and it can work without BEC), the servos plugged into the pins get no power supply, so you need to supply power to the pins separately at this time, otherwise the servos connected to the pins will not work. On the other hand, if the ESC on the pin has its own BEC (ESC 5V output), there is no need to separately supply power to the servo connected to the pins.